基础设置6-校准遥控器
遥控器舵量正反相检查视频教程 遥控器校准视频教程 校准遥控器的步骤 1、连接地面站 打开Missionplanner地面站,给飞控上电并连接飞控。 2、接入遥控器校准页面 初始设置 → 遥控器校准 进入遥控器校准页面后,能够正常查看每个遥控...
校准遥控器的步骤
1、连接地面站
打开Missionplanner地面站,给飞控上电并连接飞控。
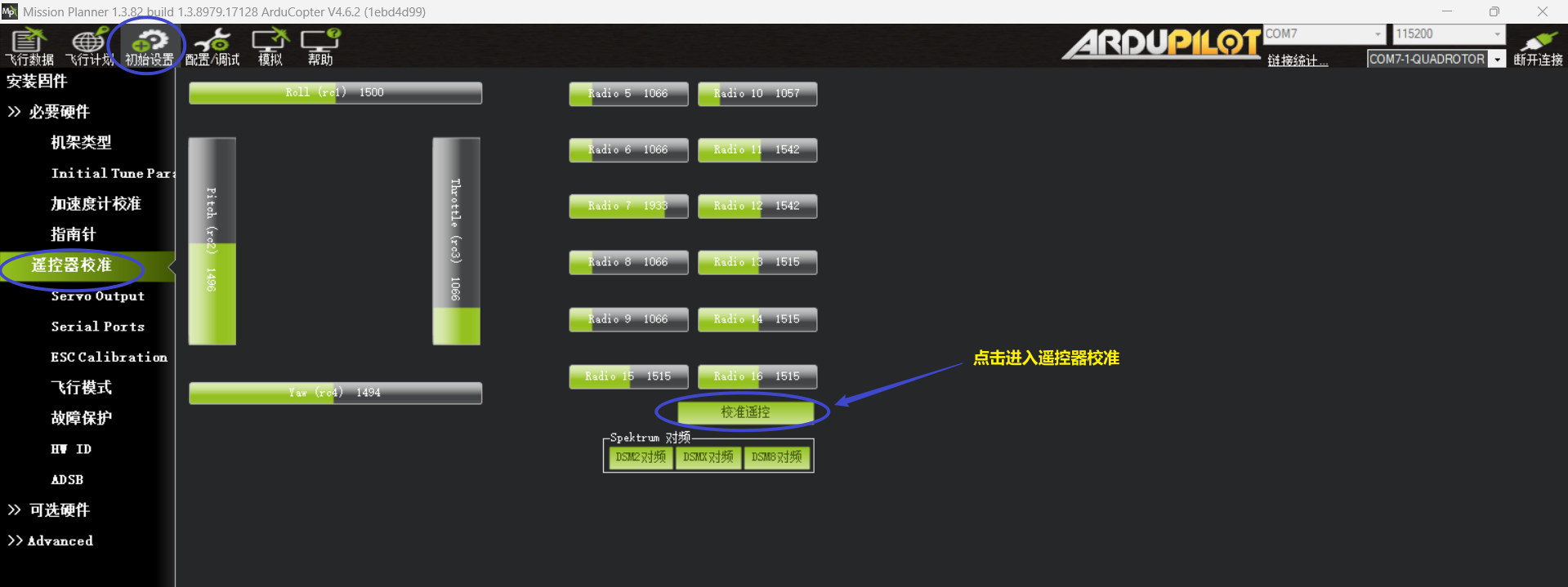
2、接入遥控器校准页面
初始设置 → 遥控器校准
进入遥控器校准页面后,能够正常查看每个遥控器通道的黄色杆量(如下图所示),如果是灰色的,则代表飞控没有正常读取到接收机的信号,需要重新检查硬件接线以及参数配置。

3、遥控器舵量正反检查
详细视频见B站链接:遥控杆舵量正反相确认
需特别注意:在AP固件中,遥控器的2通道俯仰通道是反的(向上推杆,俯仰舵量在地面站中是向下滑的)
如果俯仰通道打杆后发现反了(向上推杆,俯仰舵量向上走),要进行反相操作,方法如下:
方法1:用户可以在遥控器上对俯仰通道进行反相,不同遥控器的反相方法不同,具体大家可咨询遥控器厂商。
方法2:通过修改飞控全部参数RC2_REVERSED进行反相。 (默认=0,改为1即为反向)
| 摇杆 | 方向 | 遥控器实际 | 遥控器打杆 |
|---|---|---|---|
| 所有遥控位于中立状态 | |||
| 油门摇杆 | 向上推油门遥控杆 | ||
| 向下推油门遥控杆 | |||
| 航向遥杆 | 向左推航向遥控杆 | ||
| 向右推航向遥控杆 | |||
| 俯仰摇杆 | 向上推俯仰遥控杆 | ||
| 向下推俯仰遥控杆 | |||
| 横滚摇杆 | 向左推横滚遥控杆 | ||
| 向右推横滚遥控杆 | |||
注:本人是美国手(左手控制油门与航向,右手控制俯仰和横滚),如果您是日本手或者中国手的,请根据实际情况进行调整.
4、遥控器校准视频教程
详细操作步骤见B站视频教程:APM固件遥控器校准视频教程