首飞注意6.0-解锁失败时,警告提示列表!
本文介绍APM固件解锁失败时地面站的警告提示,起飞前需检查ARMING_CHECK参数,解锁失败可通过MP地面站消息锁定原因,常见警告有电机不转、机架未选、传感器等相关问题及电池电压、指南针等相关警告,还提及对应可能原因及解决方案。
前言:APM固件的所有告警消息查询
实际上Ardupilot固件的所告警消息,均可在Ardupilot的官方文档进行查阅,如下为多轴和固定翼告警消息的超链接
警告消息中英对照表--Excel下载
鉴于AP官方的注释都是英文的,因此本人利用AI进行了简单的翻译,固件是基于4.6.3版本。如有异议或冲突请以官方为主!
Ardupilot固件多轴与固定翼消息警告提示、产生原因、解决方法汇总表V1.1-20260316.xlsx (35.26 KB)

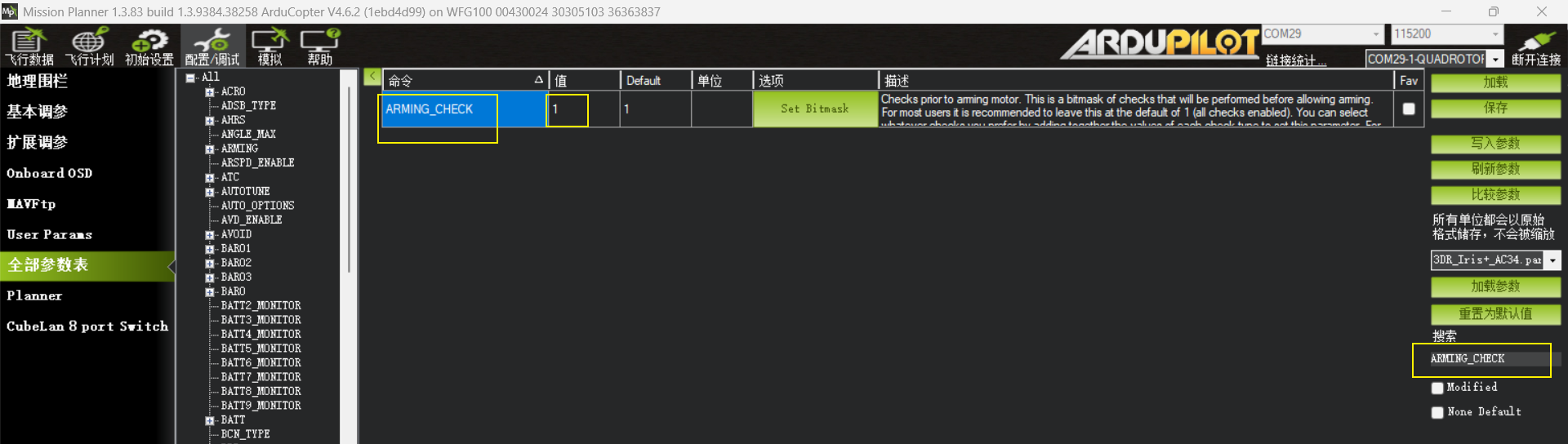
1、起飞前,请务必打开ARMING_CHECK
AP固件内部有一套非常完善的Pre-Arm安全检查提醒机制,会检查你的飞行器是否有大量问题,包括各种未校准,已经是否传感器已经出现损坏?当然这解锁检查机制也不是百分百可靠的,但仍然可以为我们避免很多飞行事故的发生!
大家可能会在室内调试时出现无法解锁的情况,此时可将参数ARMING_CHECK = 0 ,解锁前所有检查项目,均不检查!
为了安全起见,在外场飞行时,请务必检查参数ARMING_CHECK = 1,这样无人机在解锁时,会帮我们检查各个子系统的状态是否正常,降低无人机起飞后发生意外的可能性!
至于ARMING_CHECK都检查了什么,可参阅文档《ARMING_CHECK都检查了什么?》
2、提示报错是难免的!(莫慌)
大部分新手朋友,在跟着上述步骤装完机后,有很大的概率在室外无法解锁。
遇到无法解锁的情况时,请不用紧张,打开MP地面站的消息提示栏,根据提示消息锁定解锁失败的原因。
大家可以查看 Arm:提示的错误。 这个就是解锁失败的原因。
这些警告错误都是可以复制粘贴的,如果英文看不懂的,直接丢给AI马上就会给出解决方法!

3、常见的警告信息列表
| 问题类别 | 问题/报错信息 | 可能原因 | 解决方案 | 备注 |
|---|---|---|---|---|
| 解锁后电机不转 | 地面站显示已解锁,但是电机没有转动! | 使用的是Dshot协议的4合一电调,但飞控默认输出的是PWM协议! | 修改参数MOT_PWM_TYPE的值。 默认情况下 MOT_PWM =0。是PWM协议。参数MOT_PWM = 4(代表Dshot150).参数MOT_PWM = 5(代表Dshot300). 参数MOT_PWM = 6(代表Dshot600). 参数MOT_PWM = 7(代表Dshot1200). | |
| 机架类型未选择 | Motors: Check frame class and type电机:检查机架类别和类型 | 机架类别或类型未知、未设置、配置错误 | 输入有效的机架类别和/或类型参阅《机架类型选择》 | |
| 电机滴滴一直叫 | 电机滴滴一直叫 | 没有选择机架类型 | 参阅《机架类型选择》 | |
| 加速度计相关 | 3D Accel calibration needed加速度计需要校准 | 加速度计校准尚未完成 | 完成加速度计校准 | |
| Accels calibrated requires reboot加速度计校准后需要重启 | 加速度校准后必须重新启动飞控 | 重启飞控 | ||
| Accels inconsistent加速度计不一致。 | 两个加速度计不一致0.75米/秒/秒 | 重启飞控。如果故障仍然存在,请更换飞控。 | ||
| Accels not healthy加速度计不健康。 | 至少一个加速度计未提供数据 | 重启飞控。如果故障仍然存在,请更换飞控。 | ||
| Gyros inconsistent陀螺仪不一致 | 两个陀螺仪数据偏差≥5 度 / 秒 | 重启自动驾驶仪并保持设备静止,直至陀螺仪校准完成;让自动驾驶仪预热后重启;若问题持续,更换自动驾驶仪; | ||
| Gyros not calibrated陀螺仪未校准。 | 启动时默认执行的陀螺仪校准失败 | 重启飞控并在上电后保持无人机静止,直至陀螺仪校准完成! | ||
| Gyros not healthy陀螺仪不健康 | 至少一个陀螺仪未输出数据 | 重启自动驾驶仪;若问题持续,更换自动驾驶仪 | ||
| 日志记录 | logging failed日志记录失败 | 默认飞控开启了日志记录,无法写入日志。 | 没有插SD卡;SD卡异常需要重新格式化;如果实在没有SD卡可将全部检查处的log检查关闭! | |
| No SD card无 SD 卡 | SD 卡损坏或缺失 | 格式化 SD 卡,或更换 SD 卡 | ||
| 电池电压相关 | Battery 1 low voltage failsafe电池1低电压保护 | 电池电压低于参数BATT_LOW_VOLT预设的值 | 更换电池,或者调整BATT_LOW_VOLT的数值。 | |
| Battery unhealthy电池不健康 | 电池不提供数据 | 检查电池监视器外设的物理连接和配置。 | ||
| Battery failsafe电池故障保护 | 电池故障保护已触发 | 电量低,无人机已触发了低电压或低电量保护。具体执行返航还是降落根据用户配置的参数而决定。详见《失控保护与低电量保护》 | ||
| 指南针相关 | Compass not calibrated指南针未校准 | 未进行指南针校准操作 | 执行指南针校准。 | |
| EKF compass variance指南针方差过大 | 指南针方向不正确 | 将飞控远离环境中的金属。将指南针移离框架中的金属。重复指南针校准;禁用内置指南针。 | ||
| Compass not healthy指南针不健康 | 至少一个指南针未提供数据指南针传感器报告其不正常,这是硬件故障的迹象。 | 检查指南针与飞控的连接和配置。 | ||
| Compasses inconsistent指南针不一致 | 两个罗盘的角度或场强不一致 | 检查外置罗盘的方向是否与机头朝向一致;将飞控远离环境中的金属;重复指南针校准;禁用内置指南针。 | ||
| Check mag field (xy diff:x>875)检查磁场 | 罗盘水平场强过大或过小 | 将飞控远离环境中的金属。将指南针移离框架中的金属。重复指南针校准;禁用内置指南针。 | ||
| Check mag field (z diff:x>875)检查磁场 | 罗盘垂直场强过大或过小 | 将飞控远离环境中的金属。将指南针移离框架中的金属。重复指南针校准;禁用内置指南针。 | ||
| Check mag field: x, max y, min z检查磁场 | 罗盘场强过大或过小 | 将飞控远离环境中的金属。将指南针移离框架中的金属。重复指南针校准;禁用内置指南针。 | ||
| Compass offsets too high指南针偏移量过高 | 指南针偏移参数值过大 | 将飞控远离环境中的金属。将指南针移离框架中的金属。重复指南针校准;禁用内置指南针。 | ||
| 遥控器相关 | RC not found遥控器信号未发现 | 飞控没有识别到遥控器信号的输入。 | 1)确认遥控器接收机的类型以及配置是否正常,具体参数配置可参阅文档《校准遥控器》 2)如果是ELRS接收机,请确认接收机的TX引脚与飞控的RX引脚相连。 3)接收机是否正常上电。 | |
| Radio failsafe on无线电已进入失控保护 | 遥控器故障保护被出发 | 1)检查遥控器的电源是否打开2)检查遥控器的失控保护配置 | ||
| RC not calibrated遥控器未校准 | 重新校准遥控器 | 《校准遥控器》 | ||
| Multiple SERIAL ports configured for RC input多个串口配置为遥控器输入 | 遥控器配置错误 | 请确认串口Serila的功能配置中,只有1个配置为RCIN! | ||
| Roll (RCx) is not neutral横滚(RCx 通道)未回中 | 遥控器横滚摇杆未回中 | 将遥控器横滚摇杆回中(可能偶尔遥控器中位发生虚位),或重新进行遥控器校准 | ||
| Pitch (RCx) is not neutral俯仰(RCx 通道)未回中 | 遥控器俯仰摇杆未回中 | 将遥控器俯仰摇杆回中(可能偶尔遥控器中位发生虚位),或重新进行遥控器校准 | ||
| Throttle (RCx) is not neutral油门(RCx 通道)未回中 | 遥控器油门摇杆过高(未拉至最低位) | 降低油门摇杆至最低位,或重新进行遥控器校准 | ||
| Yaw (RCx) is not neutral偏航(RCx 通道)未回中 | 遥控器偏航摇杆未回中 | 将遥控器偏航摇杆回中(可能偶尔遥控器中位发生虚位),或重新进行遥控器校准 | ||
| GPS相关 | GPS x: not healthyGPS不健康 | GPS没有提供数据 | 检查GPS的 物理连接以及GPS的配置。 | |
| GPS glitchingGPS故障 | GPS位置不稳定 | 等待。如果在室内,请到室外。消除可能干扰 GPS 的射频源 | ||
| High GPS HDOP水平精度误差过大 | GPS定位质量差 | 等待、重启飞控或更换起飞点 | ||
| AHRS not healthy航姿系统不健康 | EKF 航姿未解算成功 | 等待或重启飞控 | ||
| Need Alt Estimate需要高度估算 | EKF 尚未计算海拔 | 等待。让自动驾驶仪预热。确保加速度计已校准完成。 | ||
| Need Position Estimate需要位置估算 | EKF 没有位置估计 | 等待。如果在室内,请到室外。确保指南针和加速度计已完成校准。消除可能干扰 GPS 的源头。(通常是大功率的图传导致GPS无法搜星定位!) | ||
| EKF position varianceEKF位置方差 | GPS位置不稳定 | 等待。如果在室内,请到室外。消除可能干扰 GPS 的源头。 | ||
| EKF velocity varianceEKF速度方差 | GPS 或光流速度不稳定 | 等待。如果在室内,请到室外。消除可能干扰 GPS 的源头。 | ||
| EKF3 waiting for GPS config dataEKF3:等待 GPS 配置数据 | GPS 自动配置未完成 | 检查 GPS 连接及配置。(使用 DroneCAN GPS 时需特别检查) | ||
| EKF状态相关 | EKF3 Roll/Pitch inconsistent by x degs。EKF3:横滚 / 俯仰偏差 x 度 | 横滚或俯仰倾斜角估算值不一致 | 通常因 EKF3 未获取足够精度的 GPS 数据,也可能因其他传感器出错;移至室外,或等待,或重启自动驾驶仪 | |
| EKF3x vel error yEKF3x:速度误差 y | EKF3 的速度新息(innovation)为 “y”(速度估算偏差) | EKF3 位置速度新息过高;检查 GPS,或等待,或重启 | ||
| EKF3 Yaw inconsistent by x degsEKF3:偏航偏差 x 度 | 偏航角估算值不一致 | 等待,或重启自动驾驶仪 | ||
| AHRS not healthyAHRS不健康 | AHRS/EKF尚未准备就绪 | 等待。重启自动驾驶仪 | ||
| EKF attitude is badEKF 姿态不佳 | EKF 没有良好的姿态估计 | 等待EKF姿态稳定。重启自动驾驶仪。更换自动驾驶仪 | ||
| EKF height varianceEKF 高度方差 | 气压计值不稳定或振动过大 | 等待。测量振动并添加减震装置 | ||
| Home too far from EKF origin返航点距离EKF原点太远 | 返航点距离EKF原点超过50公里 | 重启自动驾驶仪!消除可能干扰 GPS 的源头。(通常是大功率的图传导致GPS无法搜星定位!) | ||
| Vehicle too far from EKF origin飞行器距离EKF原点太远 | 飞行器距离EKF原点超过50公里 | 重启自动驾驶仪!消除可能干扰 GPS 的源头。(通常是大功率的图传导致GPS无法搜星定位!) | ||
| 参数配置相关 | Motors: MOT_SPIN_ARM > MOT_SPIN_MIN电机:参数MOT_SPIN_ARM >参数 MOT_SPIN_MIN | MOT_SPIN_ARM 过高或 MOT_SPIN_MIN 过低 | 降低 MOT_SPIN_ARM 至 MOT_SPIN_MIN 以下。 | |
| Mode channel and RCx_OPTION conflict飞行模式切换通道与 RCx_OPTION 冲突 | 遥控器飞行模式开关同时被用作辅助功能 | 修改 FLTMODE_CH(飞行模式通道, Rover 车型为 MODE_CH)或 RCx_OPTION 参数以消除冲突 | ||
| Duplicate Aux Switch Options辅助开关功能重复 | 两个辅助开关配置了相同功能 | 检查辅助功能配置;查看是否有 RCx_OPTION(遥控器通道功能)参数值重复 |