1、GPS模块
注: APM固件支持接入2个GPS模块,用作冗余。 假如用户需要接入2个GPS模块,首先要在全部参数中,将参数GPS2_TYPE设置为1(开启第二个GPS功能) 当接入2个串口GPS模块时需要在飞控硬件端口上找2个串口与分别与2个GPS模块...
注: APM固件支持接入2个GPS模块,用作冗余。
假如用户需要接入2个GPS模块,首先要在全部参数中,将参数GPS2_TYPE设置为1(开启第二个GPS功能)
- 当接入2个串口GPS模块时需要在飞控硬件端口上找2个串口与分别与2个GPS模块进行连接,同时需要对两个Serila口的参数的功能和波特率进行配置。
一、GPS模块说明
GPS模块目前有2种主流的通讯方式:分别是串口通讯、CAN通讯两类。其中串口通讯的模块价格比较便宜,但支持走线的距离较短(如果是30-40cm的走线那么完全足够了);GAN通讯的GPS模块抗干扰能力较强,支持远距离走线(米级长度)。
当前的GPS模块基本上已集成了磁罗盘传感器,如果接入了含有外置罗盘的GPS模块,建议关闭WFG100飞控的内置罗盘,可降低罗盘被干扰的风险。
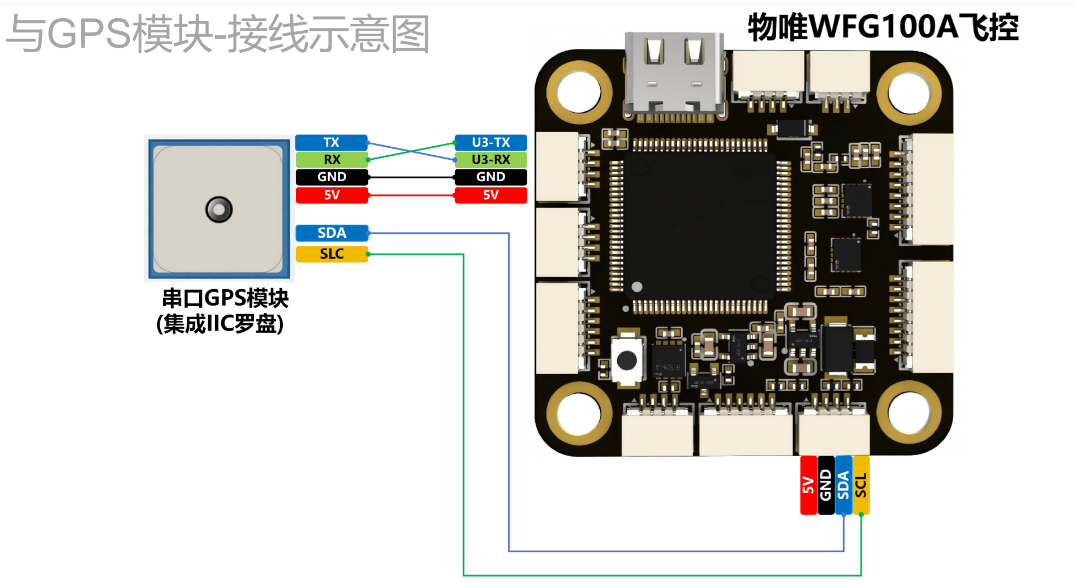
1)串口通讯的GPS模块(集成IIC通讯的罗盘):
- 串口通讯的接6根线:分别是5V、GND、RX、TX、IIC-SDA、IIC-SCL
- 参考链接:北天BH-252Q带罗盘的GPS模块(端子中T代表TX、R代表RX、G代表GND、V代表5V、C代表IIC-SCL、D代表IIC-SDA)

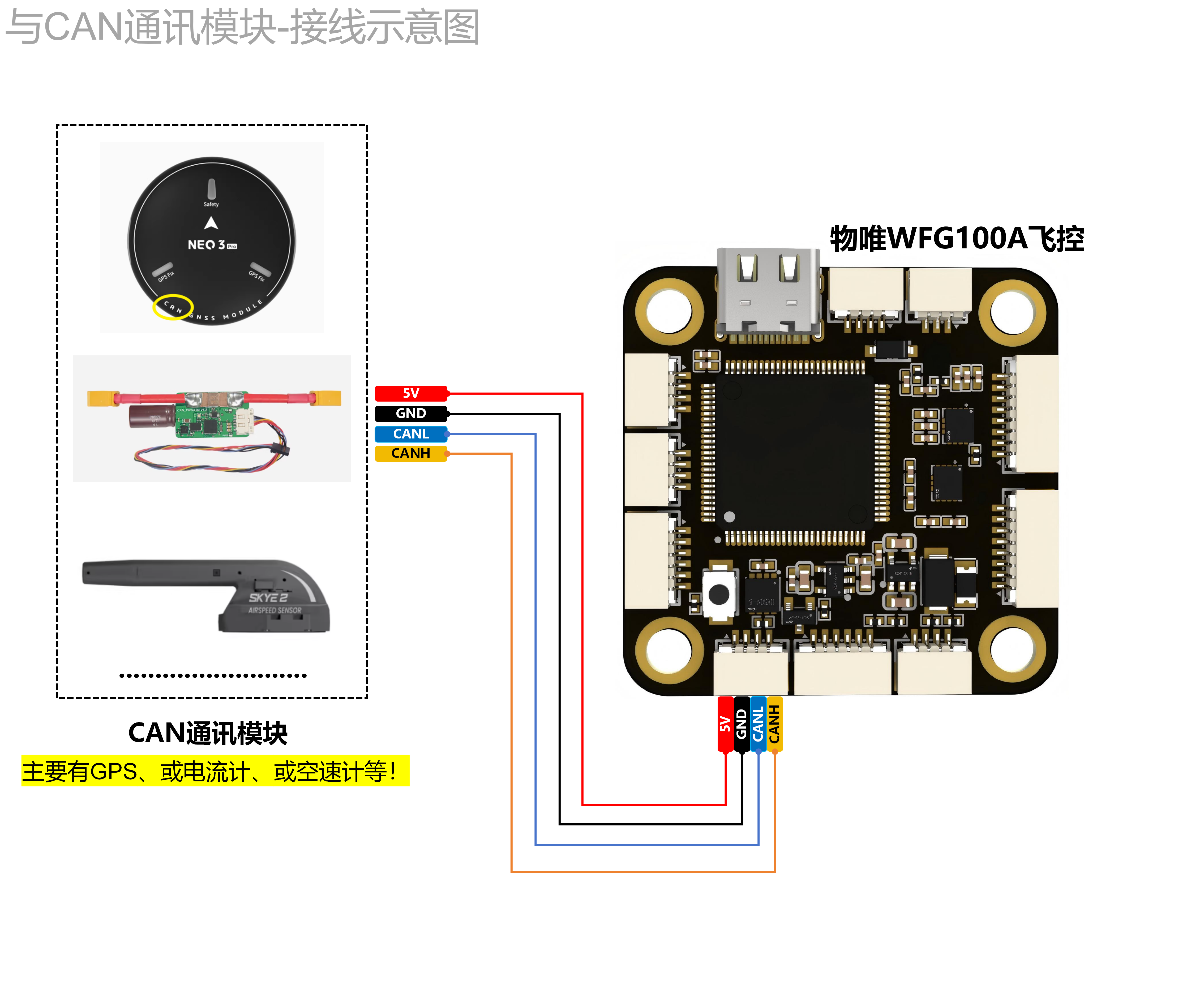
2)CAN通讯的GPS模块:
- 一般只需要接4根线:分别是5V、GND、CAN-L、CAN-H
- 参考链接:雷迅NEO4 SE -CANGPS模块
二、串口通讯GPS模块硬件连接、参数配置
2.1 串口GPS硬件连接
串口通讯的GPS模块,将其与飞控的串口3(U3)相连。
2.2 查看APM串口映射表
通过下表可知:
飞控硬件的MCU硬件串口3与飞控固件的Serial4对应,因此我们需要通过Missionplanner地面站对Serial4的相关参数进行配置。

更多AP串口的映射关系,请参阅《AP串口映射配置》
2.3 串口通讯GPS模块参数配置:
1) 配置为串口功能:
将SERIAL4_PROTOCOL=5,配置为GPS功能。

2) 配置为GPS模块的数据类型:
如果只接1个GPS模块,只需确认参数GPS1_TYPE = 1 。(默认就是=1,自动识别GPS模块的协议)
如果接了2个GPS模块,那么还需要将GPS2_TYPE = 1 。(GPS2_TYPE该参数默认=0,关闭第二个GPS模块);
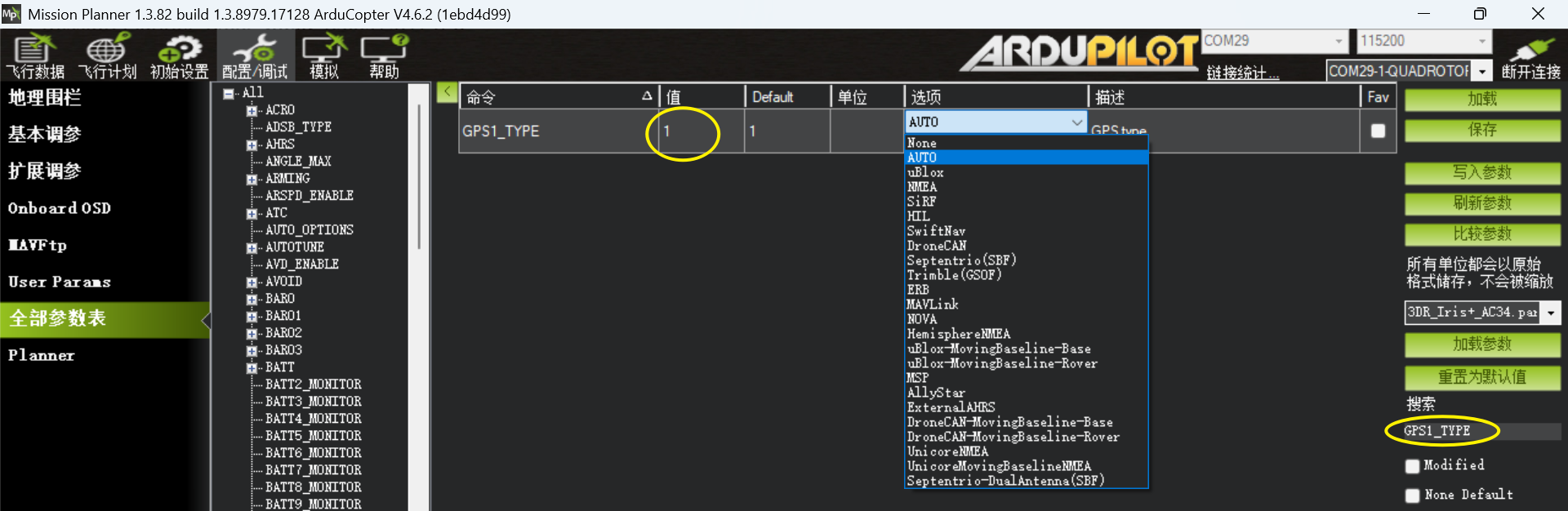
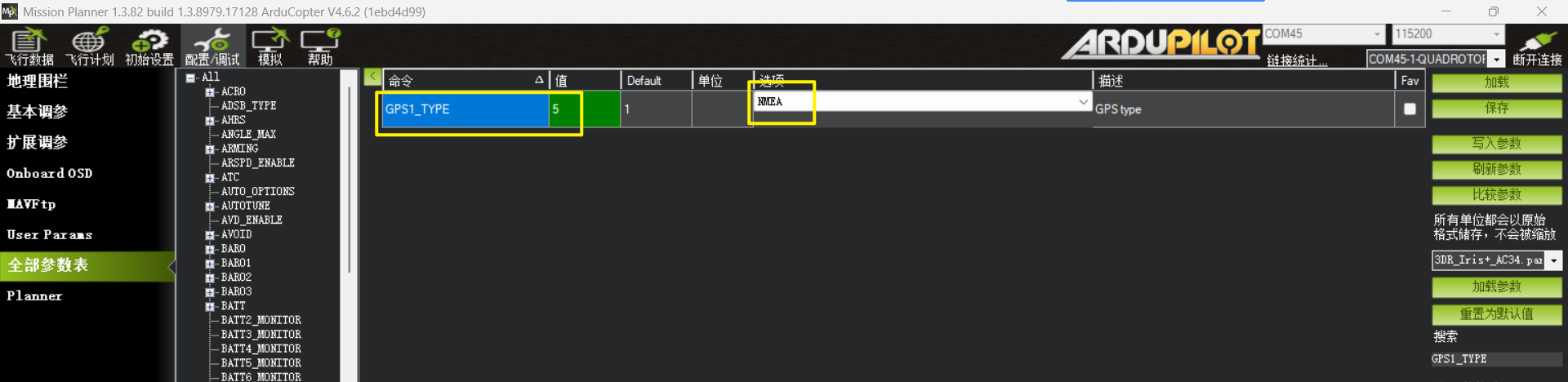
常见的GPS数据协议有ublox、NMEA、NOVA、DroneCAN等等.
如果我们明确知道GPS模块的协议,那么就可将参数GPS1_TYPE设为指定的数值,如果不清楚那么就将 GPS1_TYPE = 1(自动识别)
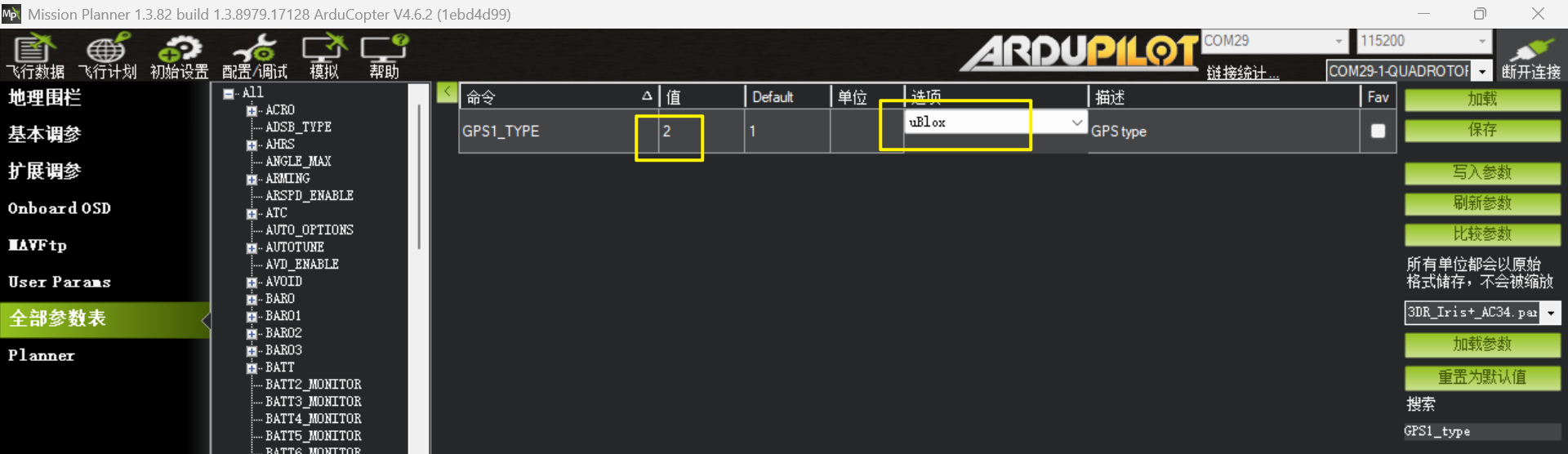
如GPS模块是UBLOX协议通讯,那么就可以将GPS1_TYPE = 2 (ublox协议)
如果我们明确自己的GPS模块是NMEA协议通讯,那么就可以将GPS1_TYPE = 5
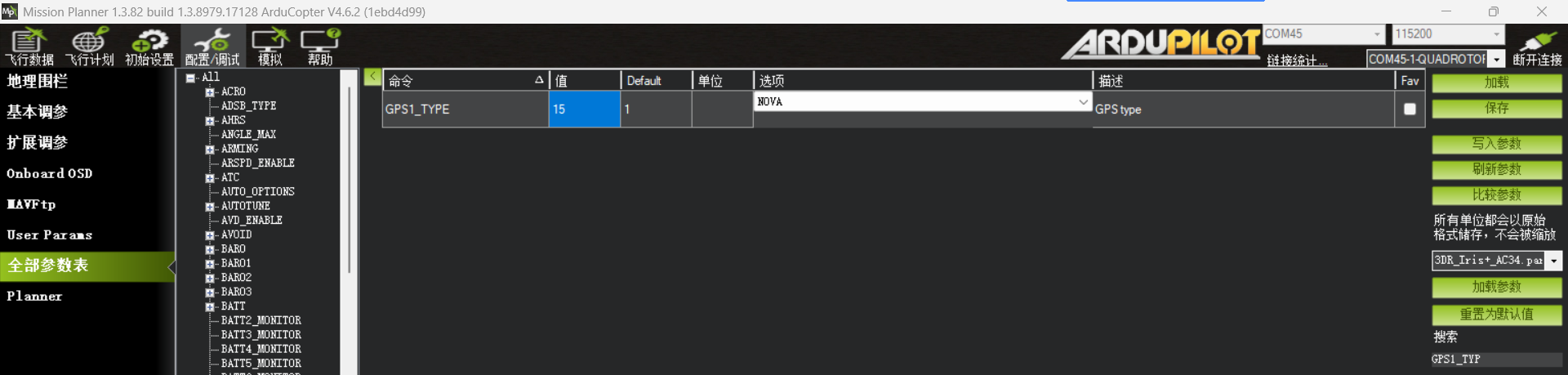
如果我们明确自己的GPS模块是NOVA协议通讯,那么就可以将GPS1_TYPE = 15
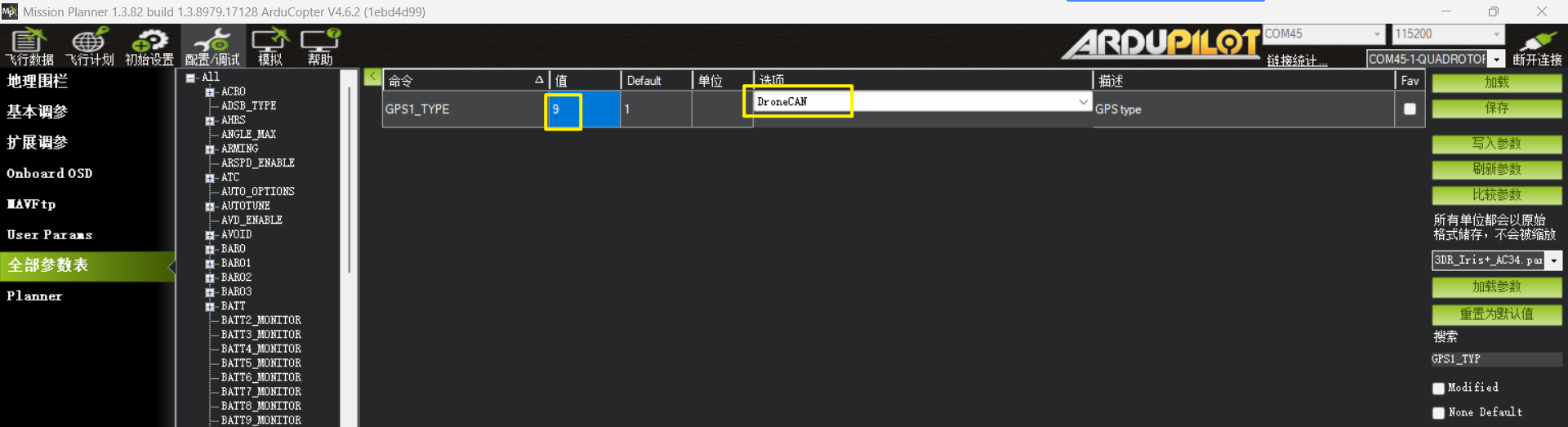
如果我们明确自己的GPS模块是DroneCAN协议通讯,那么就可以将GPS1_TYPE = 9
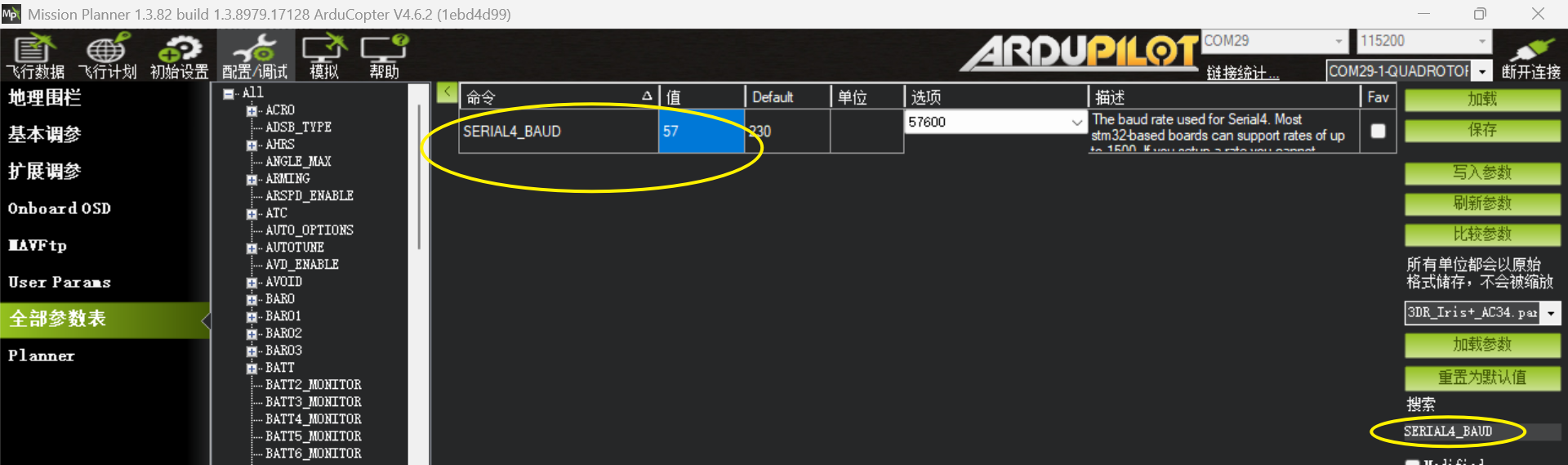
3) 配置为GPS模块的波特率:
GPS模块的默认波特率需要与GPS卖家进行确认
GPS模块的波特率也是可以修改的,但是会比较麻烦,需要配置AT指令。所以直接使用GPS默认的串口波特率即可。
如果波特率是115200,那么就将SERIAL4_BAUD = 115。如果是其他波特率,那么就在波特率下拉选型中,选择对应的波特率!
4)配置完串口功能和波特率后,重启飞控。
5)如何判断GPS模块配置正常,请参阅本文章节四!
三、CAN通讯GPS模块硬件连接、参数配置
3.1 CAN通讯GPS模块硬件连接
3.2 CAN通讯GPS模块参数配置
1) 打开CAN口功能
WFG100飞控仅有1个CAN口,通过Missionplanner地面站,将飞控的以下2个参数进行配置:
参数1:CAN_D1_PROTOCOL = 1
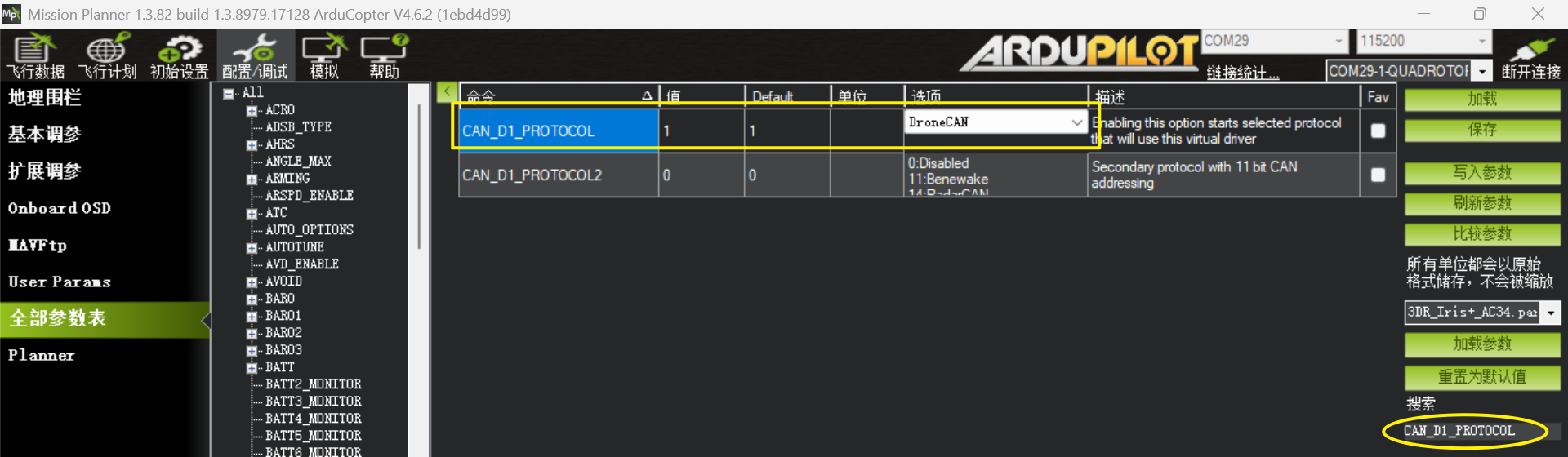
参数2:CAN_P1_DRIVER = 1

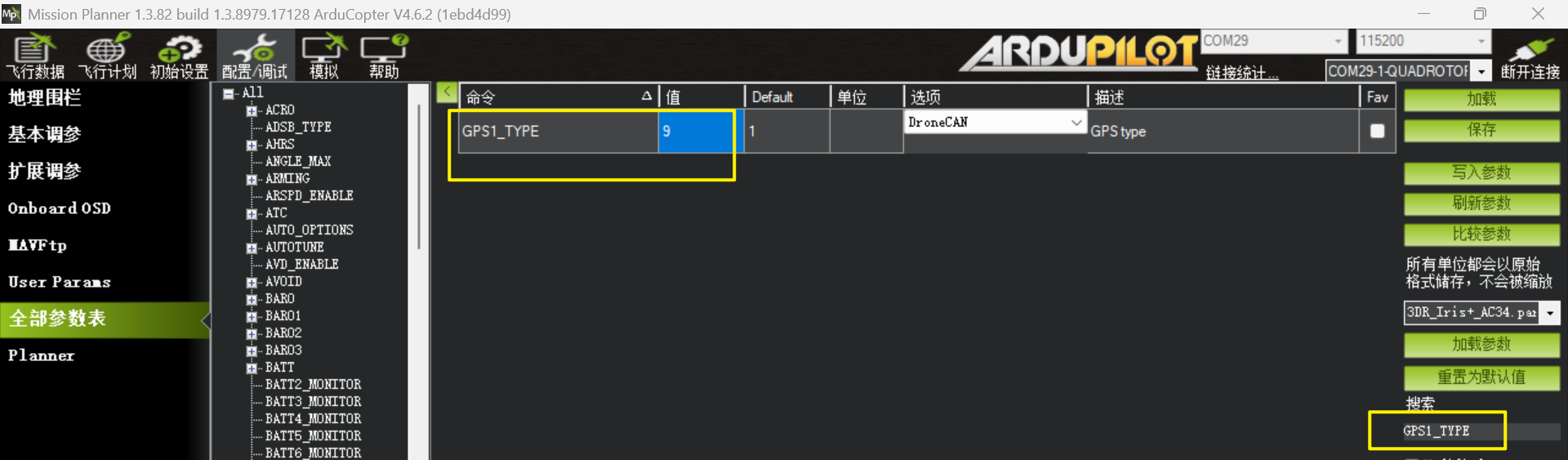
2)设置GPS模块的协议类型
当前使用的CAN协议通讯,那么就将GPS1_TYPE=9(DroneCAN协议)
3)至此CAN通讯的GPS模块设置便完成,CAN通讯的GPS模块,无需设置波特率。
四、如何确认GPS模块配置是否正常?
将GPS模块与飞控接好后,上电。
- 如果,飞控相关的GPS设置参数没有配置好,或GPS模块损坏,上电后地面站的GPS状态显示为:
无GPS
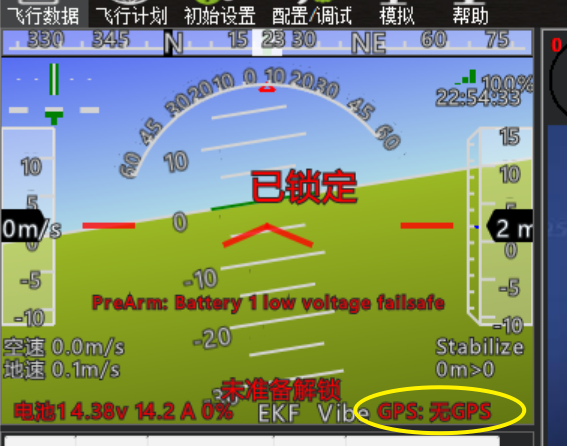
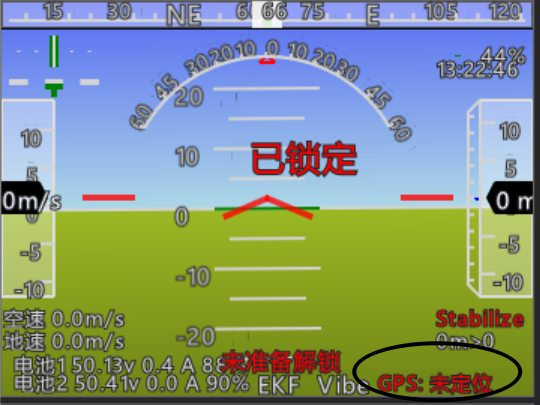
如果飞控参数配置好并且GPS模块是正常的,那么无人机在室内没有搜到星的情况下,地面站的GPS状态显示为:未定位!如下图所示:
五、如何确认GPS信号是否良好?
正常情况下,在室内是无法搜到GPS信号的,如果在窗户边可能可搜到GPS信号,但一般情况是比较差的。
使用GPS搜星,一定要在户外空旷开阔的场景进行。
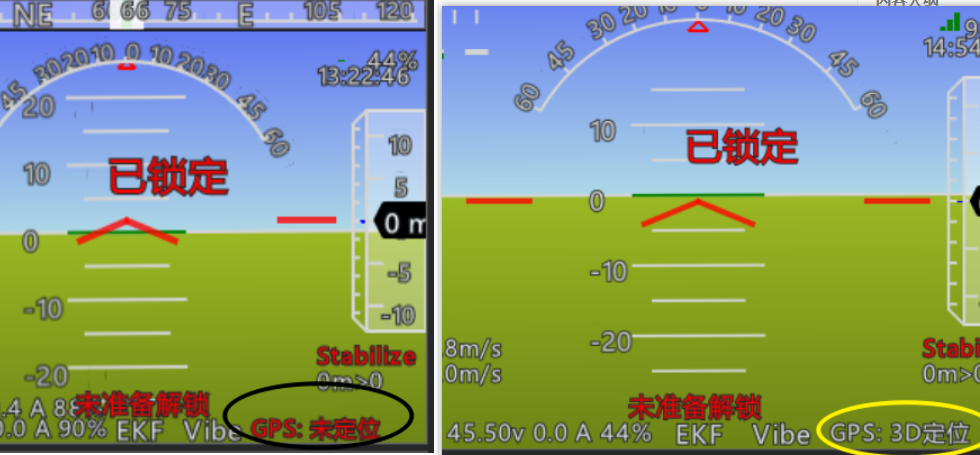
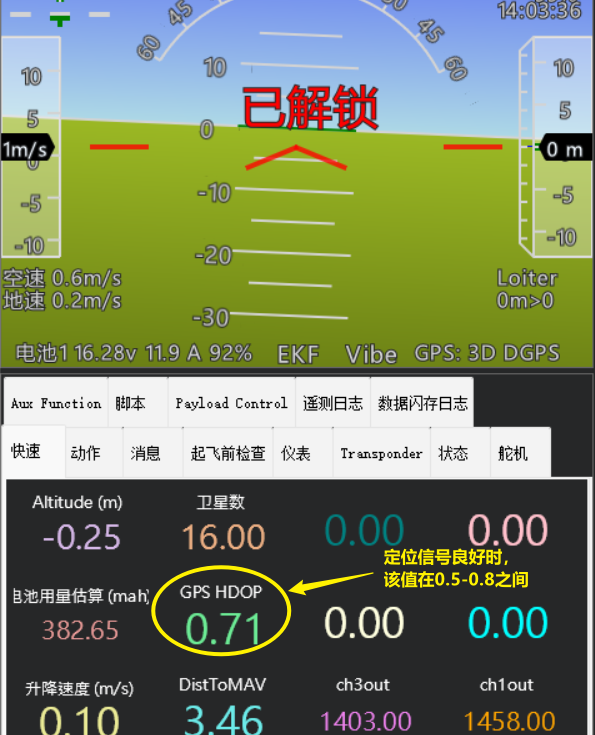
GPS的定位质量主要通过查看地面站的3处地方进行确认:
1)查看GPS状态:3D定位、2D定位、未定位。
其中3D定位的质量最好。
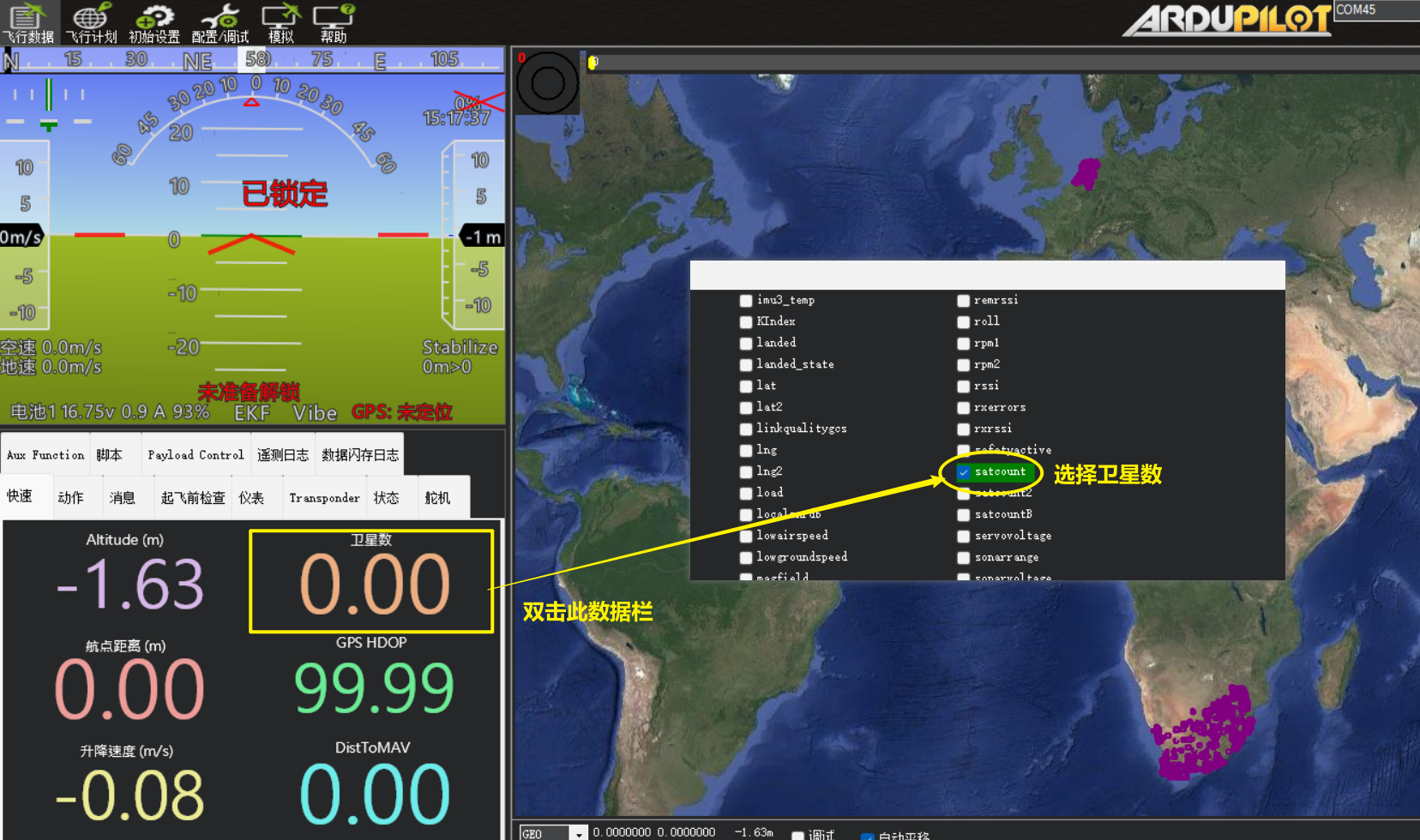
2)查看GPS卫星颗数:确保大于9颗以上
3)查看GPS HDOP状态: 建议低于1.0才解锁起飞,一般定位质量好的时候在0.5-0.8左右。
注意:GPS模块是非常重要的定位传感器,请不要贪图便宜使用低价的GPS模块,它肯能会导致GPS的HDOP值一直降不下来,从而触发APM固件的EKF保护,不允许解锁。
就算解锁后,飞机的定位效果也是非常差的,会在空中飘来飘去!
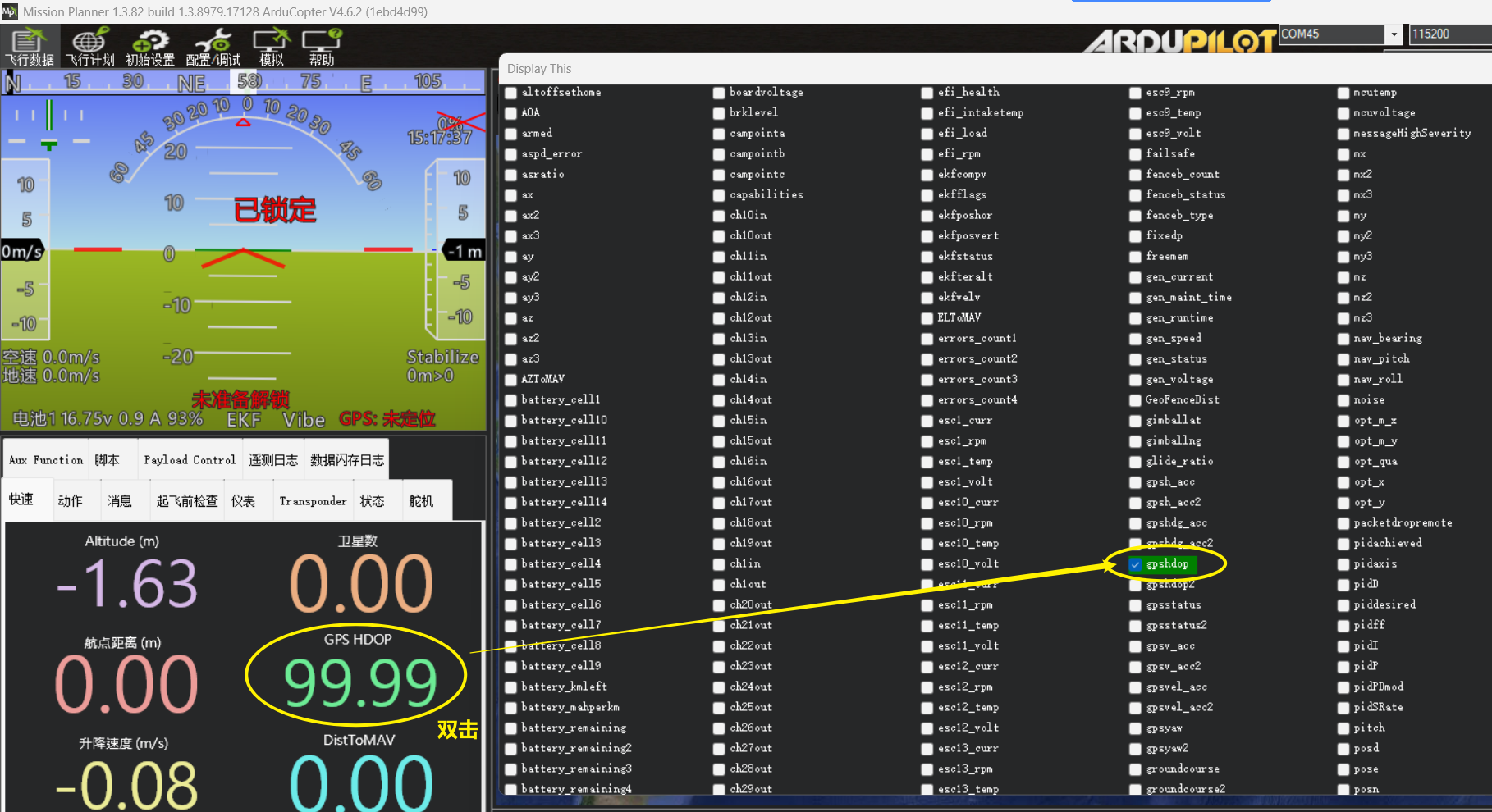
如下图所示,在户外放置一段时间后,GPS的HDOP值会从刚上电的99.99下降到0.5-0.8之间。
通常情况下,越好越贵的GPS模块,其搜星稳定速度的就会越快。
六、GPS模块的其他参数配置
6.1 双GPS的信号指定
如果用户接了2个GPS模块,可对以下参数进行设置,从而让飞控自动选定质量较优GPS模块或指定优先采用哪个GPS模块。
前提:GPS2_TYPE 不等于0
如果接了2个GPS模块,默认情况下飞控是自动选择定位质量较佳的那个作为主导航,其参数由GPS_AUTO_SWITCH决定,该参数默认 = 1
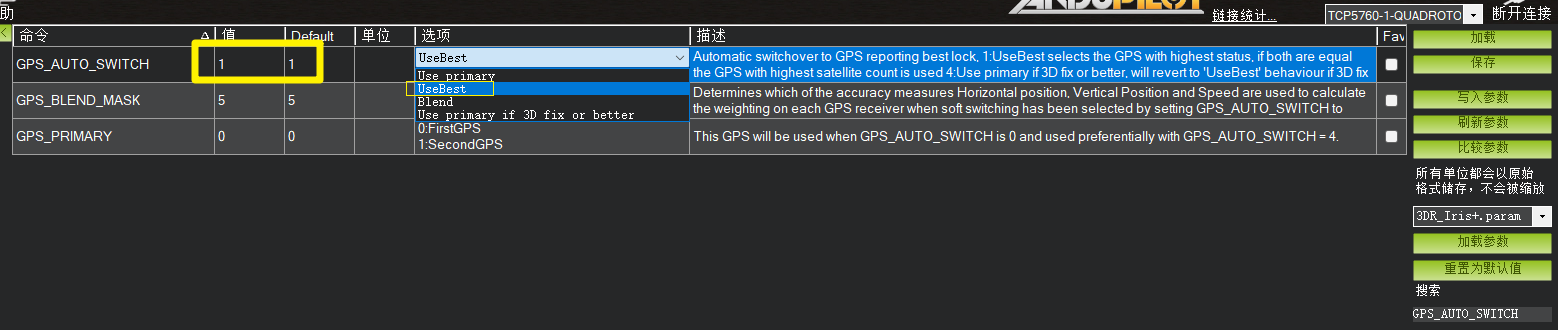
如果将GPS_AUTO_SWITCH = 0那么用户可以通过参数GPS_PRIMARY人为指定优先使用哪个GPS模块。
将参数GPS_PRIMARY = 0,那么用户指定优先使用GPS1的定位信号。
将参数GPS_PRIMARY = 1,那么用户指定优先使用GPS2的定位信号。
6.2 GPS水平定位精度因子的修改
飞控默认是需要GPS的水平精度因子低于1.4后才允许解锁,但是假如用户所在区域定位质量较差,可自行修改参数GPS_HDOP_GOOD
6.3 GPS的刷新率修改(一般默认即可)
默认 = 200ms
参数GPS1_RATE_MS
参数GPS2_RATE_MS