附2--MP地面站如何模拟垂起?
前言 以下.zip文件时已下载好的silt压缩包(包含了多轴和垂起的模拟),将其解压到C盘/MissionPlanner/silt文件夹下即可直接使用! sitl.zip 一、垂起飞行全过程(MP地面站模拟) 在上述视频中: CH3 out...
前言
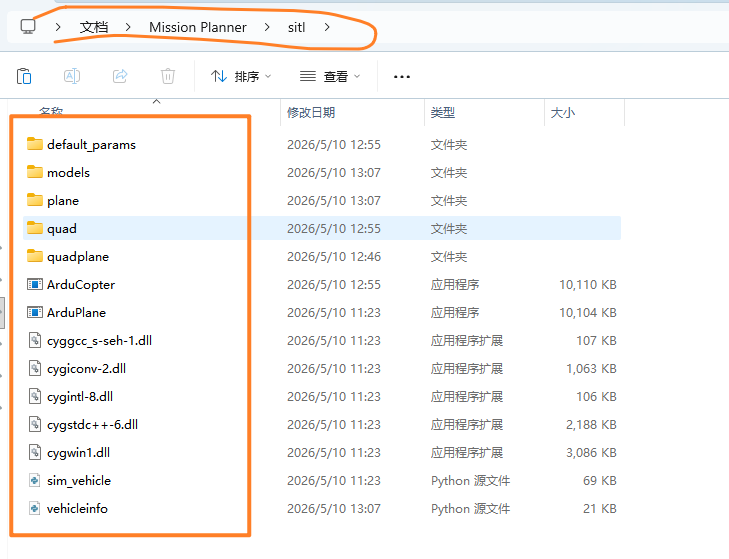
以下.zip文件时已下载好的silt压缩包(包含了多轴/固定翼/垂起固定翼的模拟文件),将其解压到C盘/MissionPlanner/silt文件夹下即可直接使用!
压缩文件如下:
一、垂起飞行全过程(MP地面站模拟)

二、如何进行垂起模拟?(首次需要魔法)

设置完成后,然后等待模拟器开启成功!
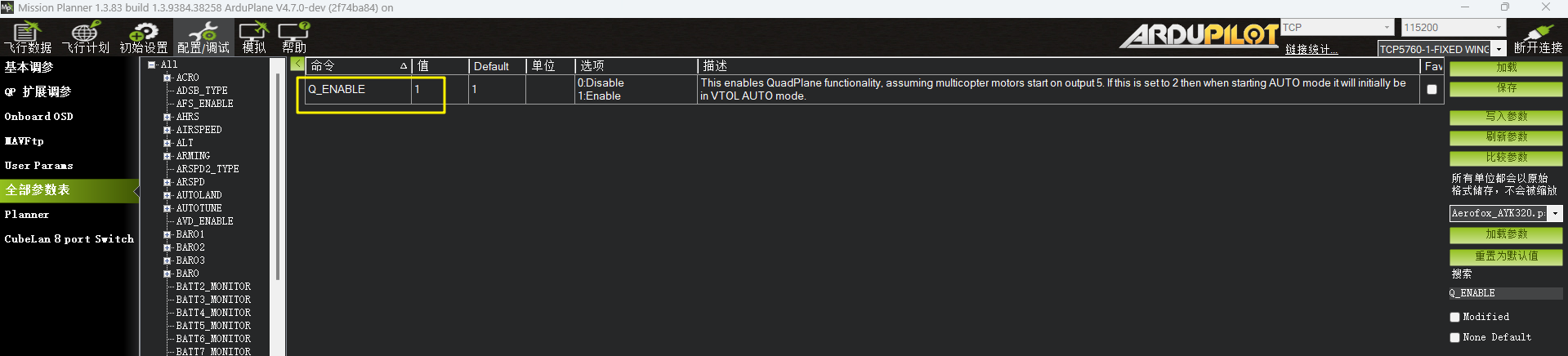
三、垂起参数配置
MP地面的垂起默认是4+1类型!
1)开启垂起功能
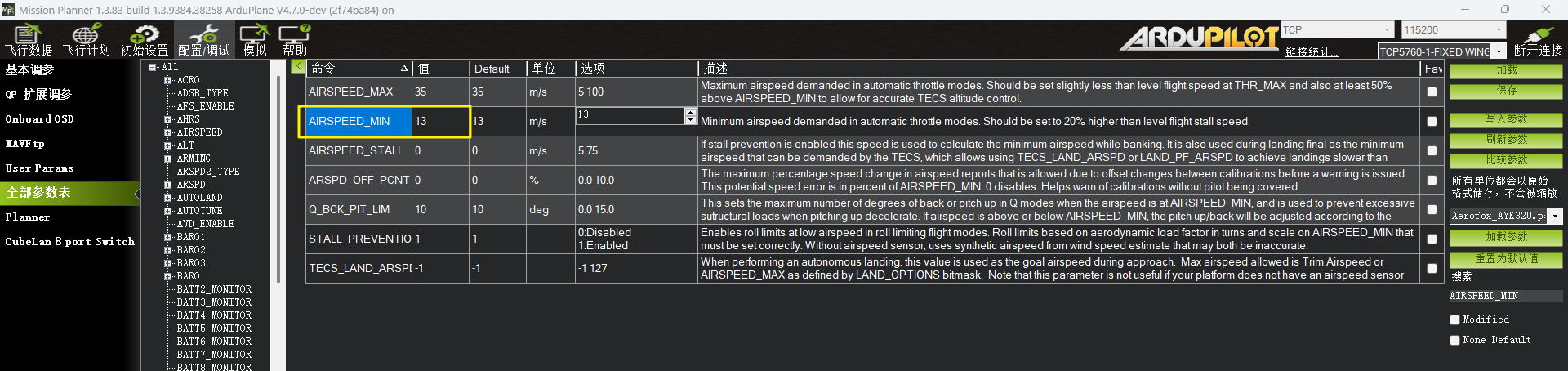
2)设置切换速度,默认是13m/s
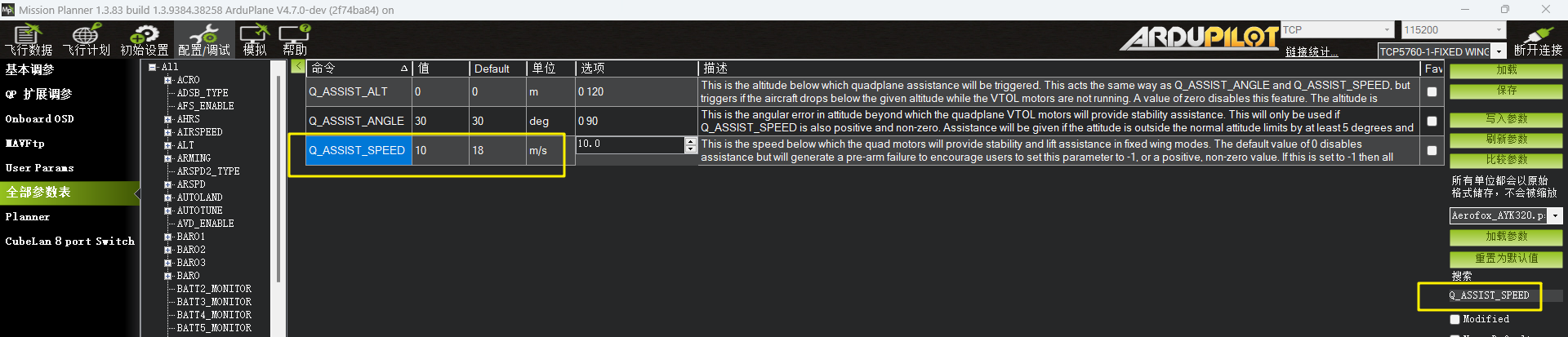
3)设置这个协助速度,否则垂起不给起飞,就随便设置一个10m/s. 默认18m/s 有点高
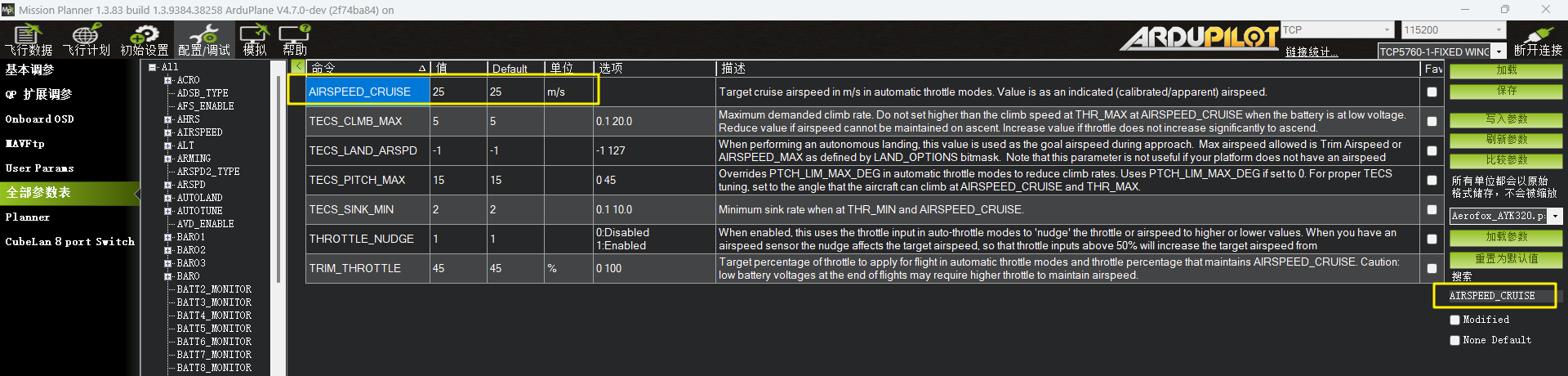
4)设置自动油门下的巡航速度,默认25m/s即可
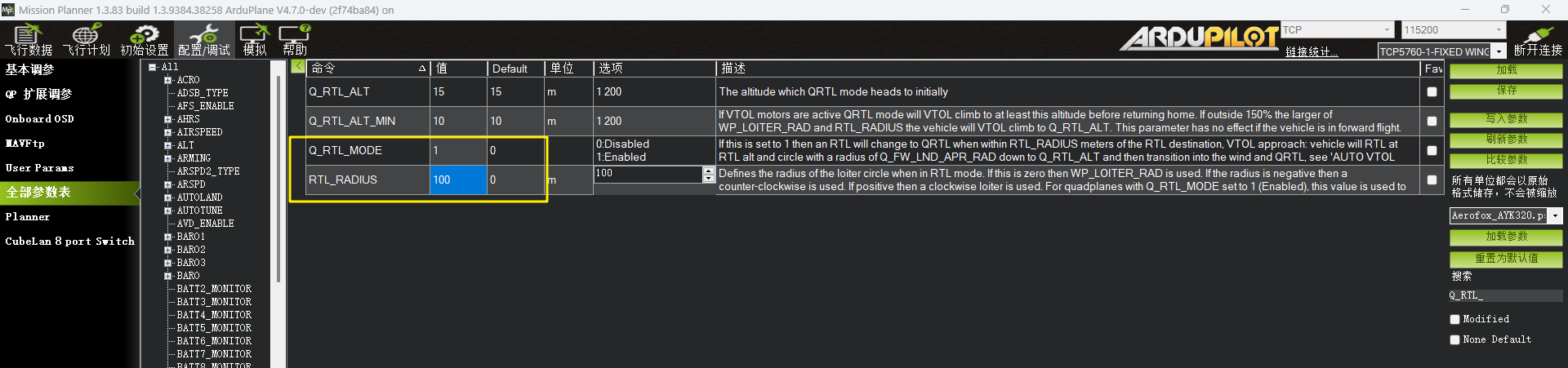
5) 开启混合返航模式(远距离固定翼返航,飞近时多旋翼返航),切换旋翼的距离设置为150m
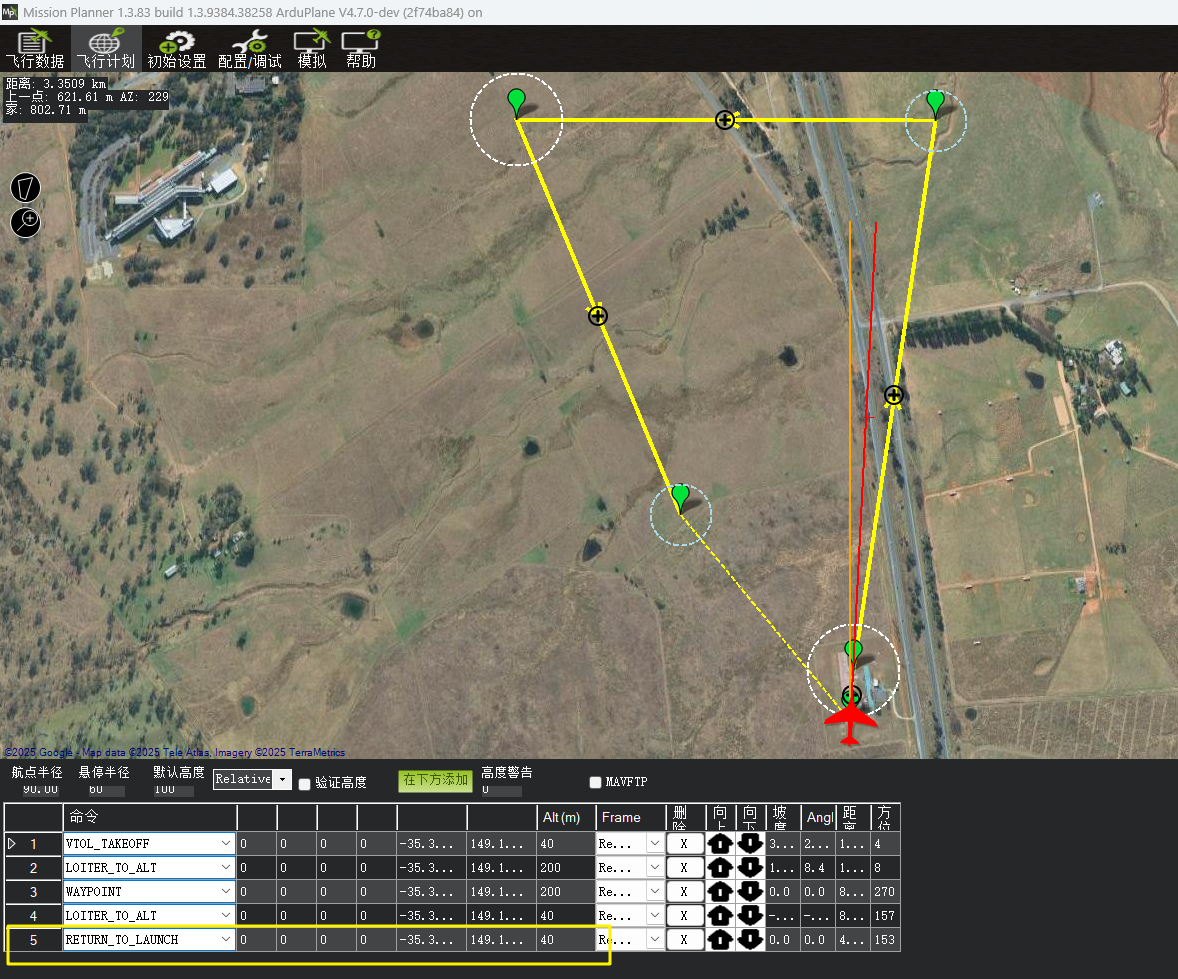
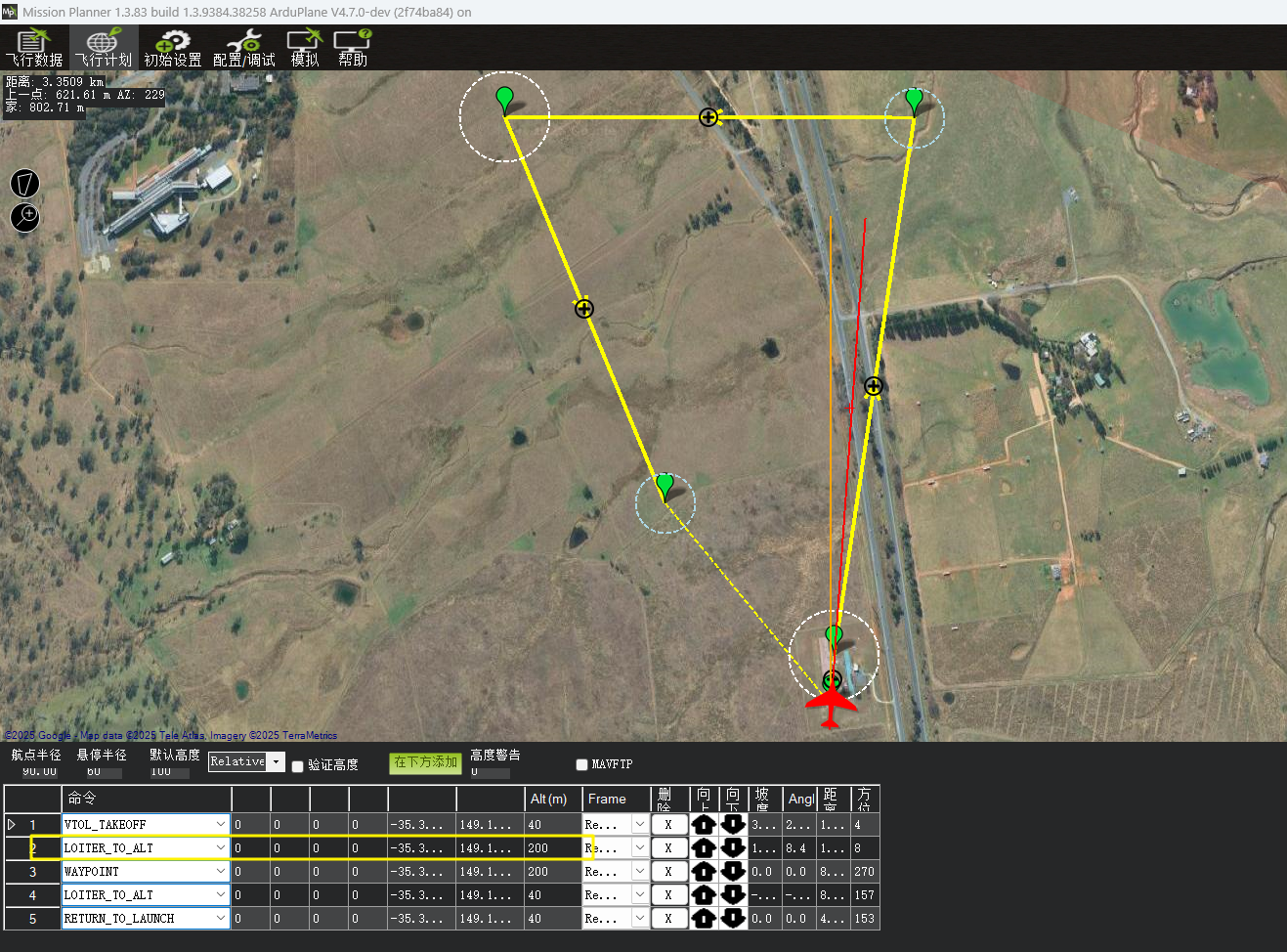
四、设置航线
1)第一个点是VTOL多轴模态起飞,设置为 VTOL_TAKEOFF起飞高度可以低点40m(省电)
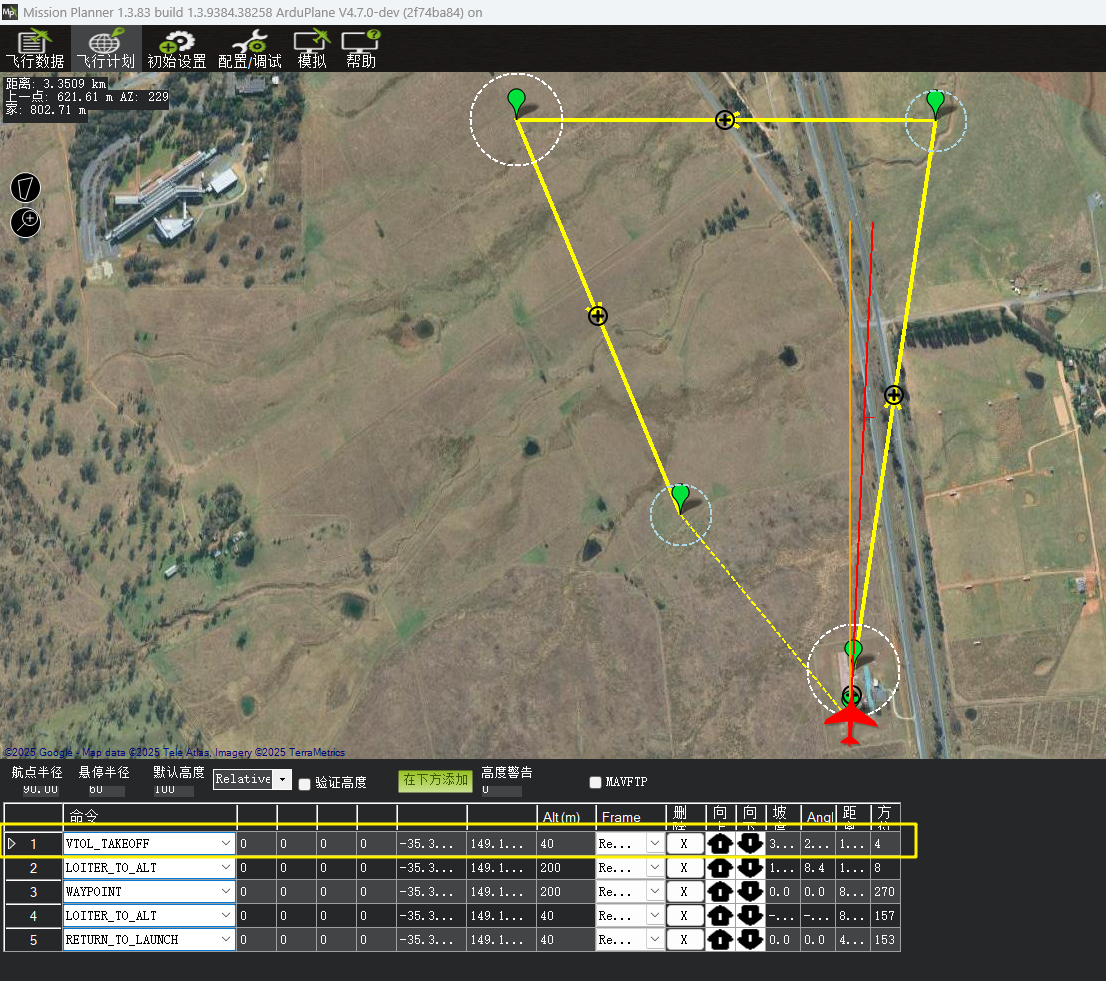
2)固定翼的飞行高度通常在200以上,所以第二个航点可以设置LOITER_TO_ALT
意思是盘旋到指定高度!此处我设置为200m高度。
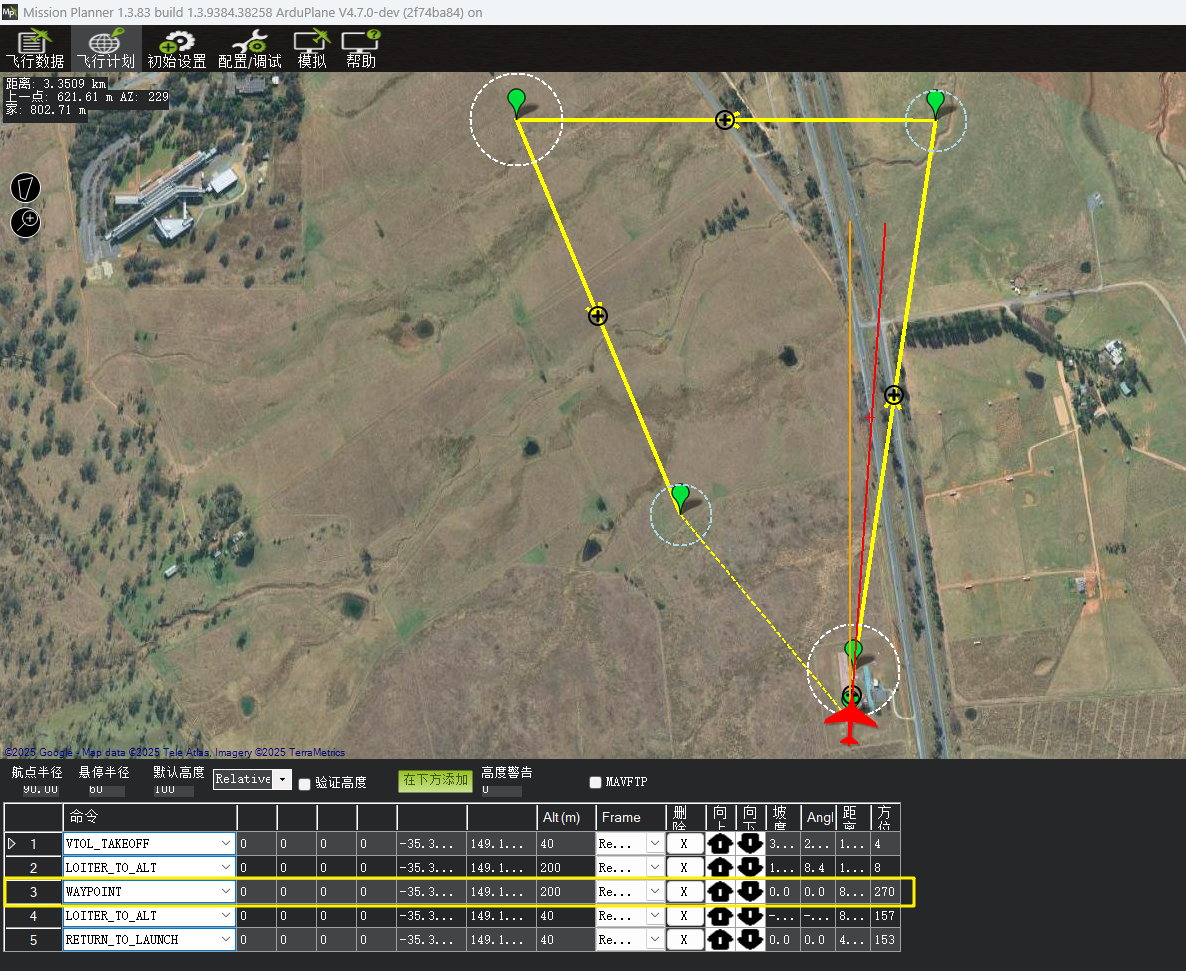
3)第三个点就是照常的航点WAYPINT命令!200m飞行高度。
4)返航前的一个航点可以设置成LOITER_TO_ALTWAYPINT命令!
将飞行高度盘旋下降到40m再切换,避免飞机以多旋翼模式在200m的高度下降下来!(高处风大,旋翼模式下降时可能会剧烈摇晃;而且高处下降费电)
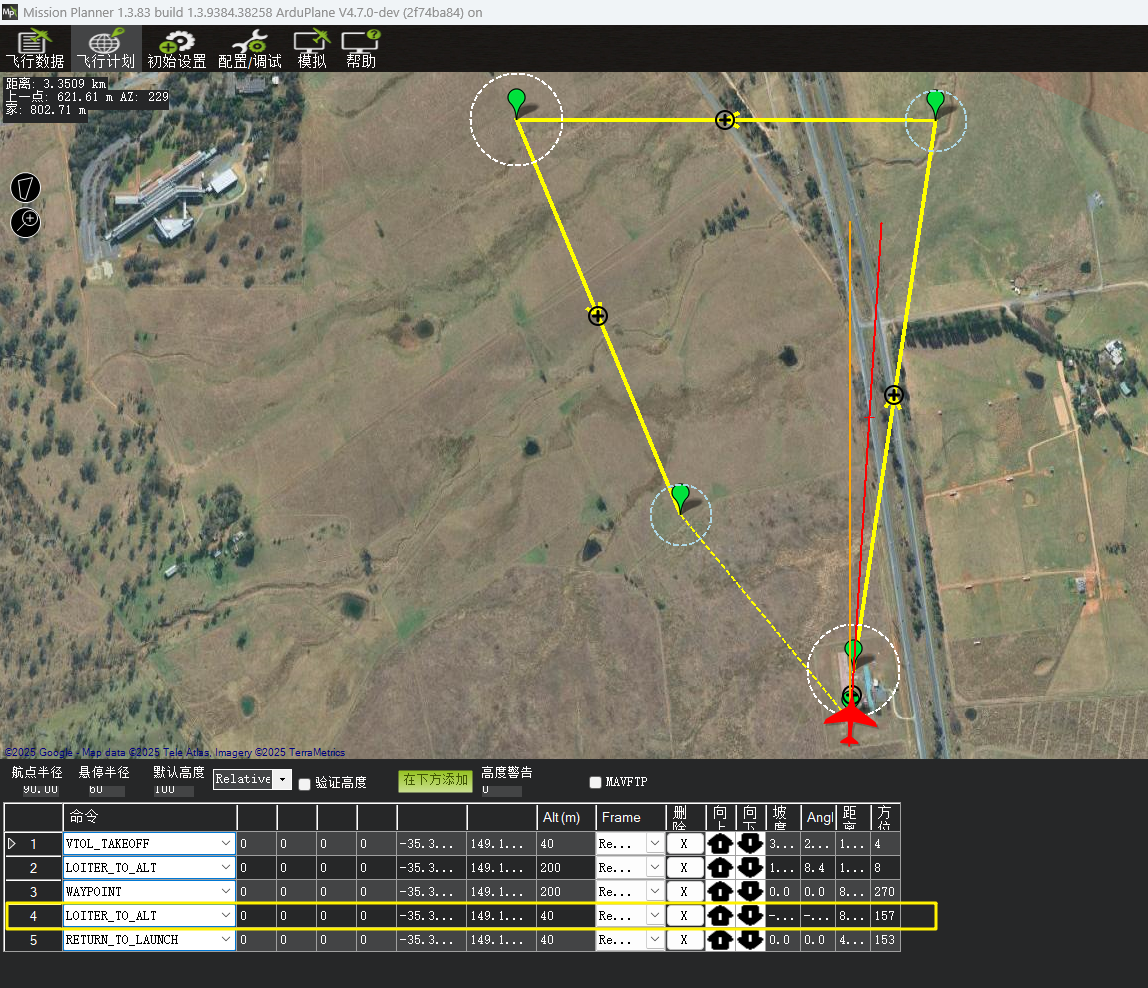
5)最后再设置一个返航命令即可!