WFG120A飞控说明书
WFG120A飞控概述 WFG120A飞控是一款高性能飞控,其主控采用STM32H743,主频480Mhz,FLASH为2MB。 采用两颗ICM-42688P传感器。 板载SPL06气压计。 板载QMC5883P磁罗盘。 板载2路电源输出,...
WFG120A 与 WFG120B的区别
- WFG120A采用的是STM32H743的主控;IMU型号为ICM-42688P;气压计采用的SPL06(国产);磁罗盘采用QMC5883P(国产)!
- WFG120B采用的是GD32H757的国产化主控,IMU型号为国产IMU;气压计采用的SPL06(国产);磁罗盘采用QMC5883P(国产)!
WFG120A飞控概述
- WFG120A飞控是一款高性能飞控,其主控采用STM32H743,主频480Mhz,FLASH为2MB。
- 采用两颗ICM-42688P传感器。
- 板载SPL06气压计。
- 板载QMC5883P磁罗盘。
- 板载2路电源输出,1路为5V3A电源,1路为12V3A电源。(车规级电源芯片)
- 兼容Ardupilot、PX4、Betaflight、INAV四种开源飞控固件。
- 提供Ardupilot、PX4、Betaflight、INAV四种飞控固件硬件配置文件,用户可按需自行修改并编译适配的固件。
硬件规格参数
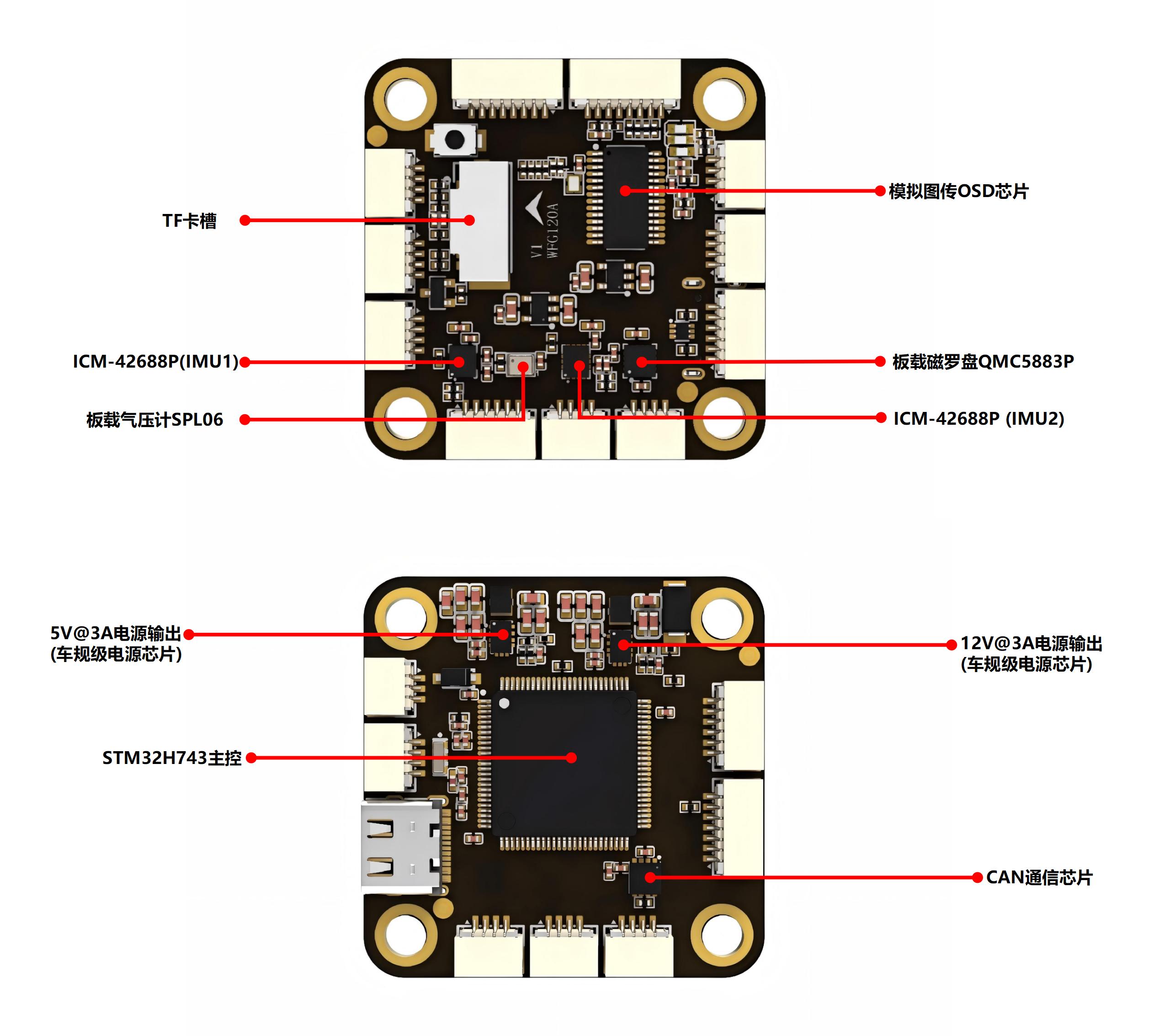
- 主控:STM32H743VIT6, 480MHz, 2MB Flash
- 加速度计与陀螺仪:双ICM-42688P冗余设计
- 板载气压计: SPL06-001
- 板载磁罗盘: QMC5883P
- 板载OSD芯片: AT7456E
- 电调/舵机信号输出通道:共计10路(MOTO1~MOTO10)
- 4合一电调直插接口:1个(集成电池正极输入BAT、电源GND、MOTO1~MOTO4、电流检测、串口RX)
- 电调/舵机扩展接口:1个(集成电池正极输入、GND、MOTO5~MOTO10)
- 预留IO引脚:4个 (PIN_IO1 ~ PIN_IO4)
- 串口:8个
- CAN口:1个
- IIC口:1个
- 模拟摄像头接口:1个
- 模拟图传接口:1个
- 高清图传接口:1个(支持大疆O3/O4高清图传直插)
- STLINK调试口:支持
- 蜂鸣器接口:支持
- LED灯带接口:支持
- 数据黑匣子:支持TF卡记录
- 板载两路BEC输出:5V@3A、12V@3A (车规级电源)
- VBAT电源输入范围:3S-8S
物理规格参数
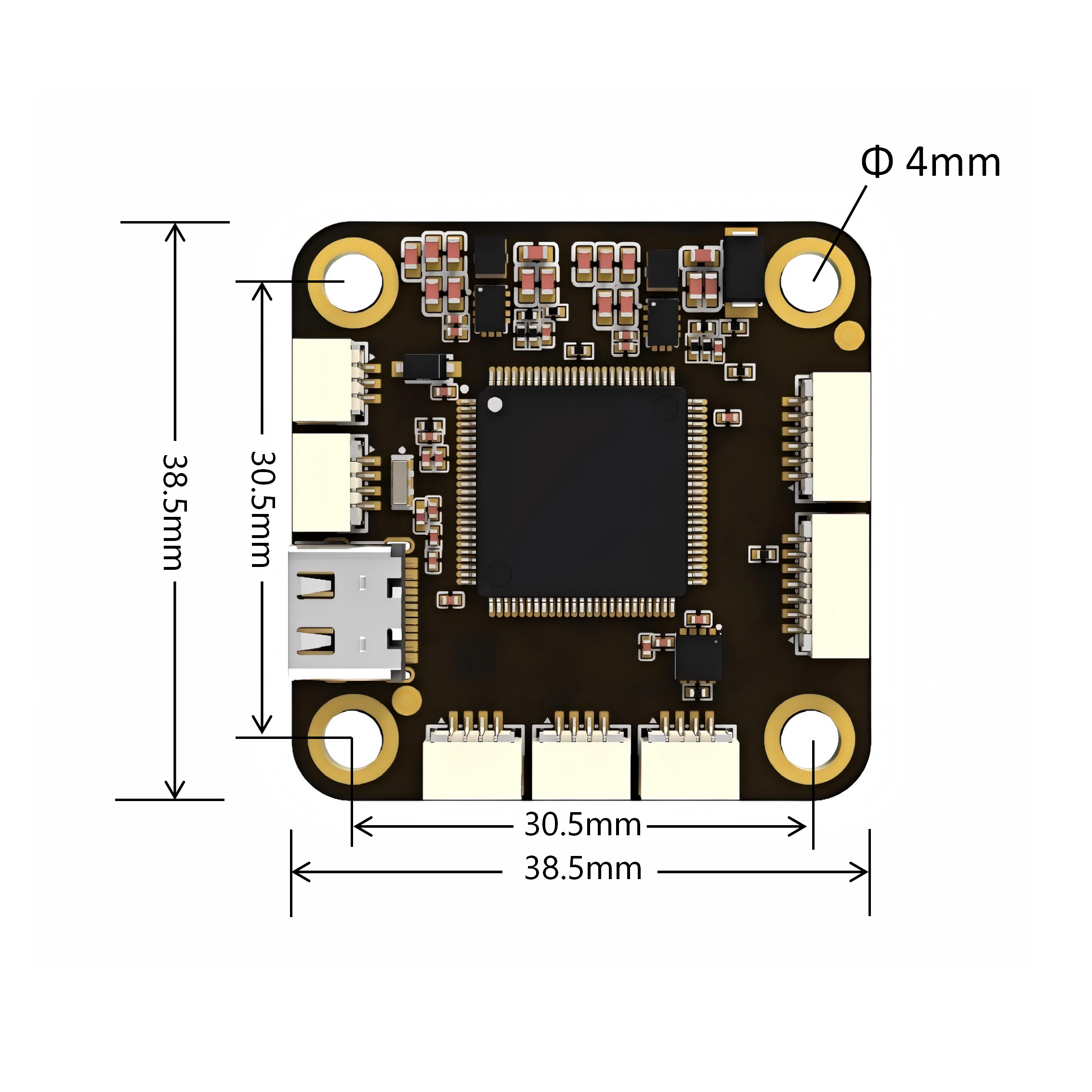
- 螺丝定位孔间距:30.5 * 30.5mm。
- 螺丝定位孔直径:4mm。
- 板卡尺寸:
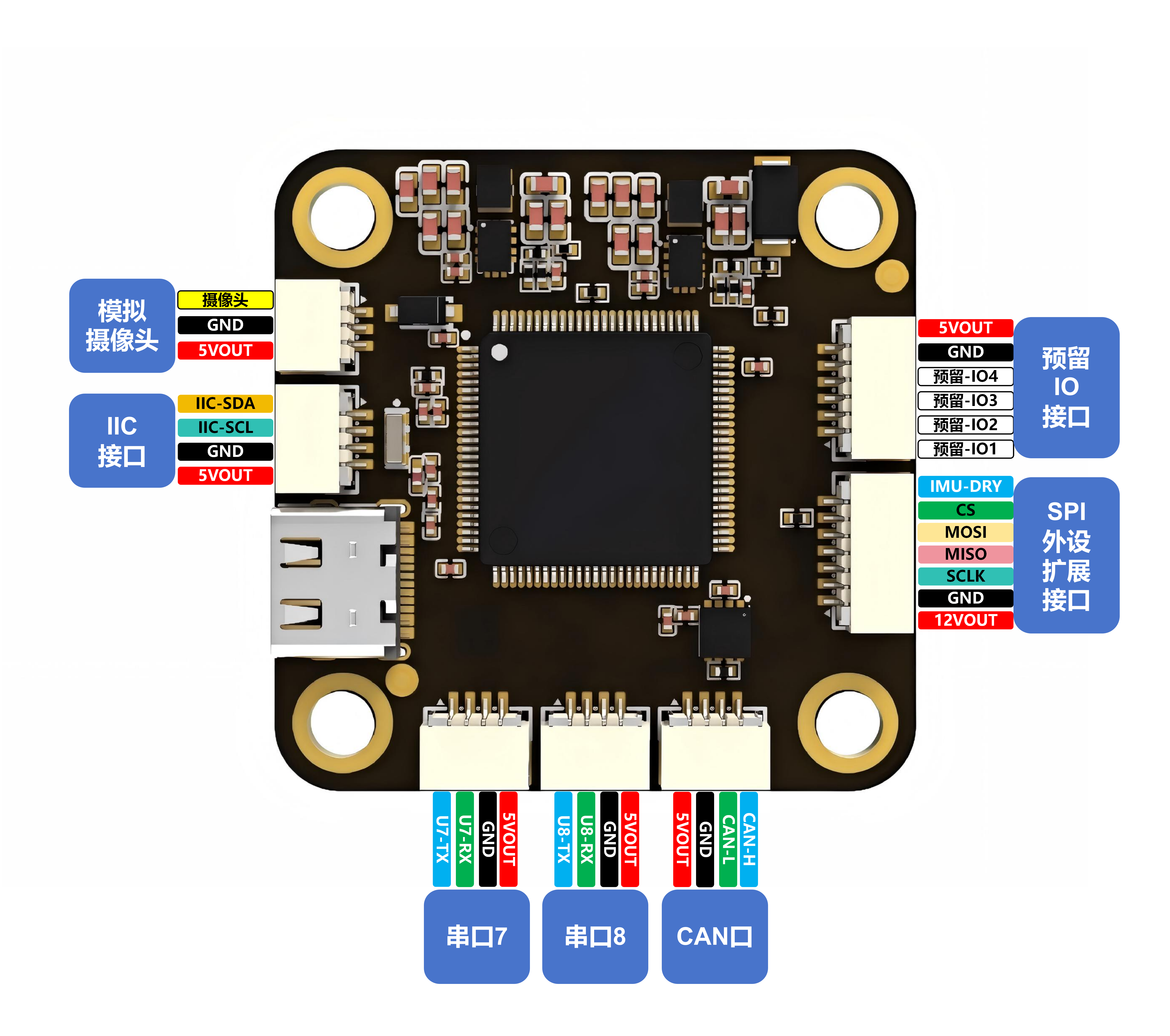
飞控接口定义图 (点击图片可查看高清大图)
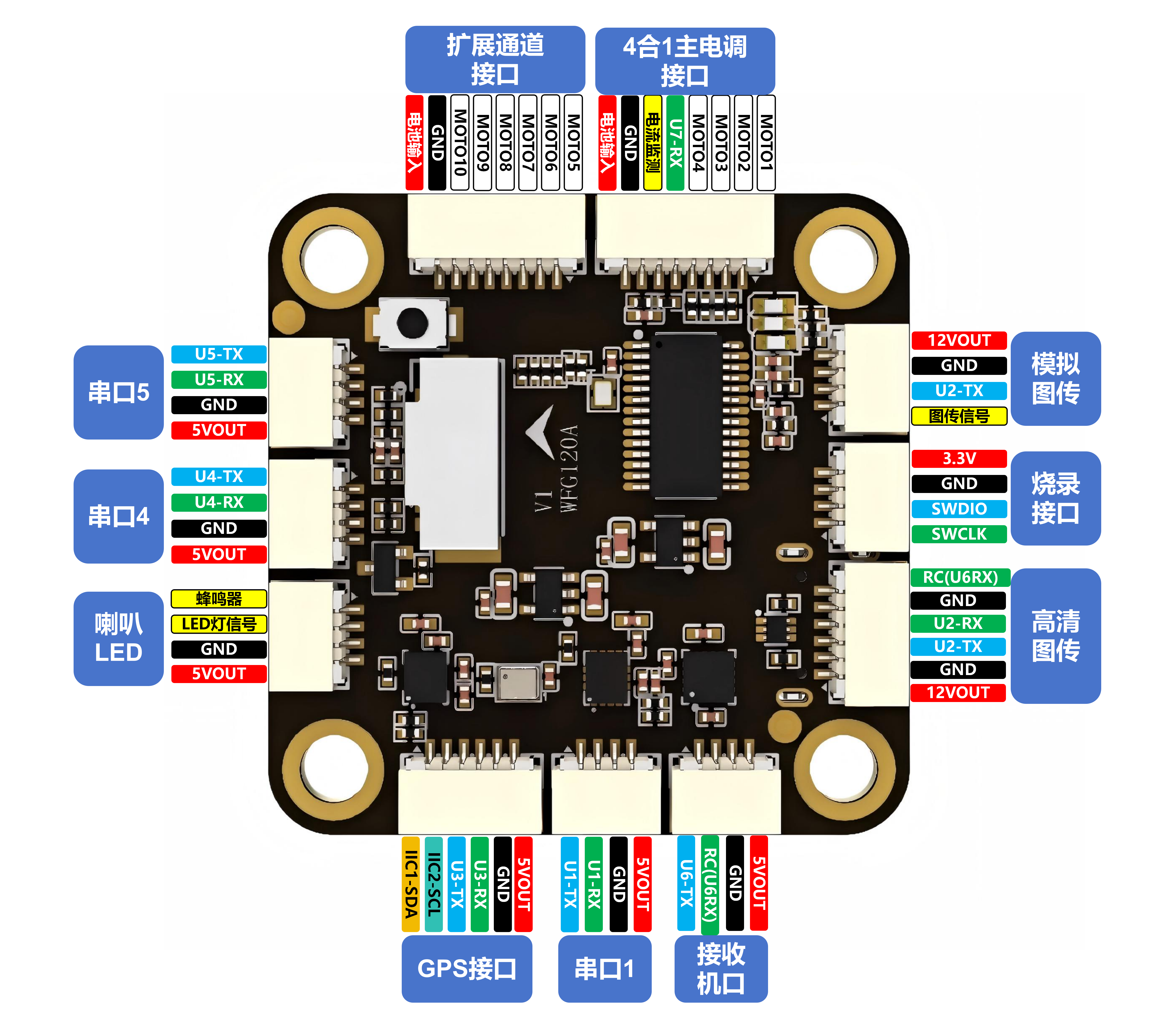
飞控接线示意图 (点击图片可查看高清大图)
飞控默认安装方向
AP固件串口映射表
PX4固件串口映射表(待更)
WFG120A烧录固件下载
固件烧录说明
请查阅文档《WFG120系列飞控固件烧录说明》
地面站下载
WFG120系列的飞控,支持AP\BF\INAV\PX4四种开源飞控固件;对应的地面站软件,请访问《四大开源固件地面站软件下载》
官方源码下载
WFG120系列的飞控,支持AP\BF\INAV\PX4四种开源飞控固件,其官方源码如下:
| WFG001A飞控官方源码下载 | |||
| 序号 | 固件类型 | 官方源码地址 | linux终端下载指令 |
| 1 | Ardupilot | ardupilot | git clone --recursive https://github.com/ArduPilot/ardupilot.git |
| 2 | Betaflight | betaflight | git clone https://github.com/betaflight/betaflight.git |
| 3 | PX4 | PX4 | git clone https://github.com/PX4/PX4-Autopilot.git |
| 4 | INAV | INAV | git clone https://github.com/iNavFlight/inav.git |
源码仓库与编译说明
通常情况下,用户直接使用物唯科技编译飞控固件即可!只有在进行源码二次开发或学习时,用户才需要自行编译飞控源码。
WFG120系列飞控目前已适配AP固件与BF固件,具体飞控源码的编译方法,请查阅文档《WFG120系列飞控源码仓库、源码编译》
源码编译环境:WSL2子系统、Ubuntu22.04
结构图纸下载
请访问文档《WFG120-结构相关图纸下载》