AP固件串级PID基本原理
测试
增量式PID的离散化公式


P和D过大都会引起的无人机姿态的震荡,如果飞机有超调可进行降P或加D,优先降P,因为D项是误差的变化率,加D项就会放大噪声!
- P项,是比例,可以理解为力度,值越大,修正力度越强!(这个应该非常好理解)
- I项,是积分,它对所有的历史误差进行累加的过程中。如只靠P的力度去调整,无论怎么调都是无法到达精准的预设目标值,所以就引出了I项,用来让无人机能够精准的停到预设值。专业一点的叫法是消除稳态误差!由于它是累计的,所以可能会饱和,因此在AP固件中的各处PID参数中都会看到
IMAX的限制参数,就是用来防止积分饱和! - D项,是微分,可以理解为刹车阻尼,用来抑制P的超调。D项是误差变化率的体现,如果原始信号不够平滑带有噪音,增大D项就会放大噪声!因此在AP固件中的各种PID参数中都会看到
FLTD的D项低通滤波参数,调小就是可以用来拦截更多的噪声,但是会让控制回路降低速率。
在AP固件里面的调参顺序是:
D项 ->P项 ->I项 ->DFF项 ->FF项目
先找到的PD大体平衡的参数,然后再单独调试I!如曲线有滞后,看情况再添加前馈!
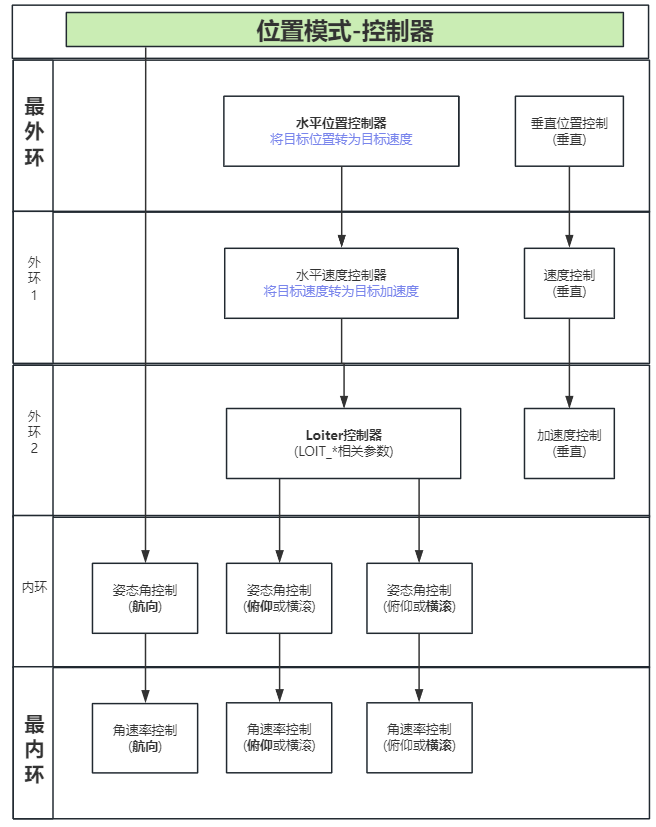
串级PID的基本原理: 位置环(最外) → 速度环 → 角度环 → 角速率环(最内)
AP多旋翼固件有多个飞行模式,常用的飞行模式是自稳模式、定高模式、定点模式。
AP固件里面的核心控制算法采用的是串级PID控制。
有些朋友能够听到AP的位置控制环、姿态角控制环、角速率控制环; 在源码层面可以拆分为四阶:位置环->速度环->姿态角度环->角速率环!每一环的输出,又是下一环的输入!

越是外环,更新速率越慢!越是内环,更新速率越快!
如何直白点理解?
位置环:飞控系统,告诉无人机 “要沿着东南方向前进 100 米”
速度环:计算 “无人机要倾斜多少度才能跑到目标速度” 这就是倾斜角 / 姿态角。
角度环:负责 “把无人机精准保持在这个倾斜角度”
角速率环:负责 “快速稳住角度,不晃、不超调”
调试要点
- 位置环(含高度环)是“最外环”(负责最终位置与高度精度),姿态角度环是“中间环”,角速率环是“最内环”(负责最快去响应)!
- 调试步骤1:先调自稳模式(STABILIZE),该模式只激活“角度环+角速率环”,是无人机姿态稳定的基础!(先调角速率环,再调角度环)
- 调试步骤2:再调定高模式(ALT_HOLD),该模式在自稳模式下,增加了“高度环”(位置环的垂维度),假如自稳没调好,定高会出现“上下蹦跳、高度漂移”的情况
- 调试步骤3:最后调定点模式(LOITER),该模式在定高模式下,增加了“水平位置环”,实现精准的位置控制!依赖速度环->姿态环->角速率环的层层执行,任何一环没调好都会定点不佳!