8、定高模式-相关参数调试
在高度保持模式下,无人机会保持恒定的高度,并且油门打杆时飞行动作会比较缓慢,同时允许正常控制横滚、俯仰和偏航。 飞行员可以通过油门杆控制飞行器的爬升或下降速度。 如果油门杆处于中间(40%~60%),飞行器将保持当前高度。 油门死区的大小,...
1、定高模式概述
在高度保持模式下,无人机会保持恒定的高度,并且油门打杆时飞行动作会比较缓慢,同时允许正常控制横滚、俯仰和偏航。
飞行员可以通过油门杆控制飞行器的爬升或下降速度,如果油门杆处于中间(40%~60%),飞行器将保持当前高度。如果油门摇杆高于中立位置,无人机将爬升高度,如果油门摇杆低于中立位置,无人机将降低高度!
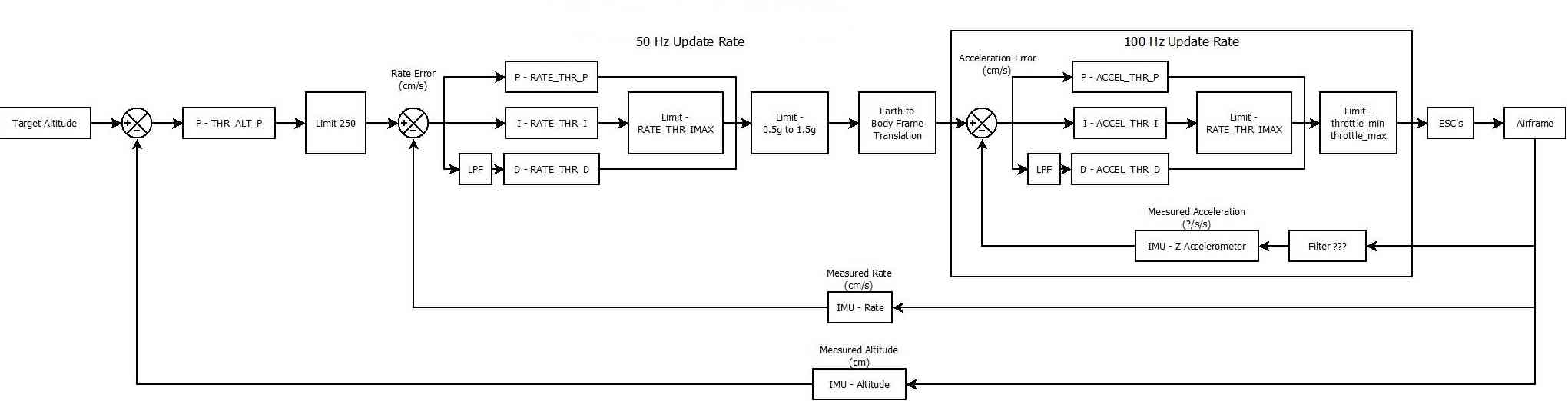
控制框图:
2、油门死区、上升与下降速度、上升与下降的最大加速度
- 油门死区的大小,可以通过参数
THR_DZ进行调整。该参数的值应介于“0”到“300”之间,其中“0”表示无死区,“100”表示在油门中点上下各 10% 的位置为油门死区(即死区范围从油门杆位置的 40% ~ 60%)。 - 默认的 升降速度为2.5m/s。定高模式下的上升与下降速度可以通过参数
PILOT_SPEED_UP(上升速度)、参数PILOT_SPEED_DN(下降速度),进行设置!当油门摇杆完全推满时或拉到最低时,也只会按照上述上升或下降速度! - 用于确定这些速度的加速度由参数
PILOT_ACCEL_Z决定。(如果在定高模式下,发现上升与下降速度非常缓慢,可以尝试增大PILOT_ACCEL_Z进行解决)

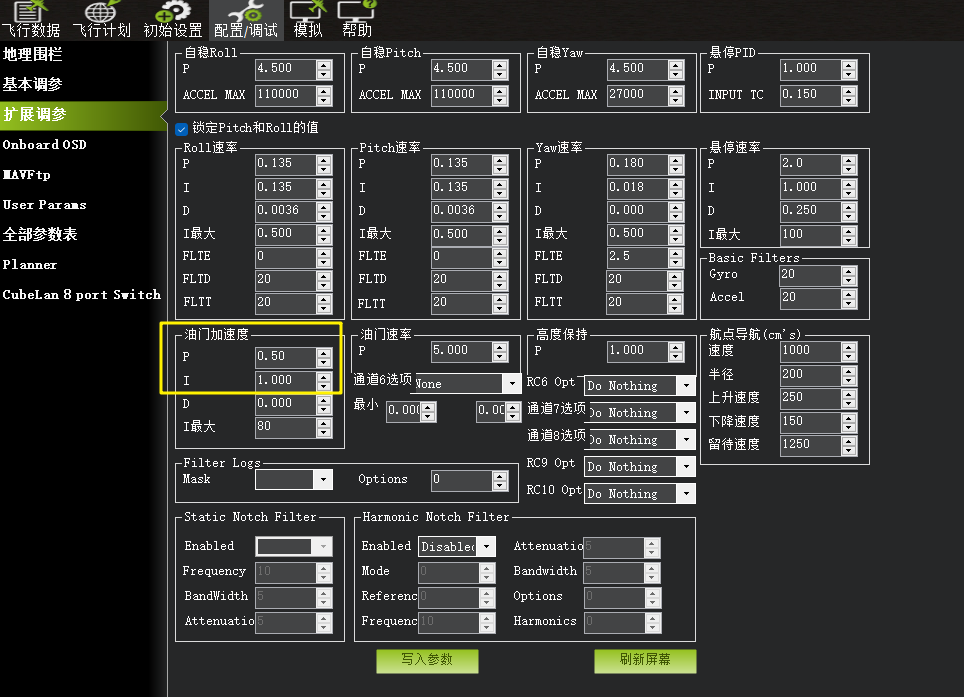
3、定高模式下,能够调试的PID参数,如下方框所示:
油门加速度是最内环、油门速率是次内环、高度保持是外环。

4、定高模式下PID参数讲解
4.1 定高PID参数1:垂直加速度PID PSC_ACCZ_P
油门加速度的PID增益,用于将期望高度的加速度与实际加速度之间的偏差,转化为电机输出。
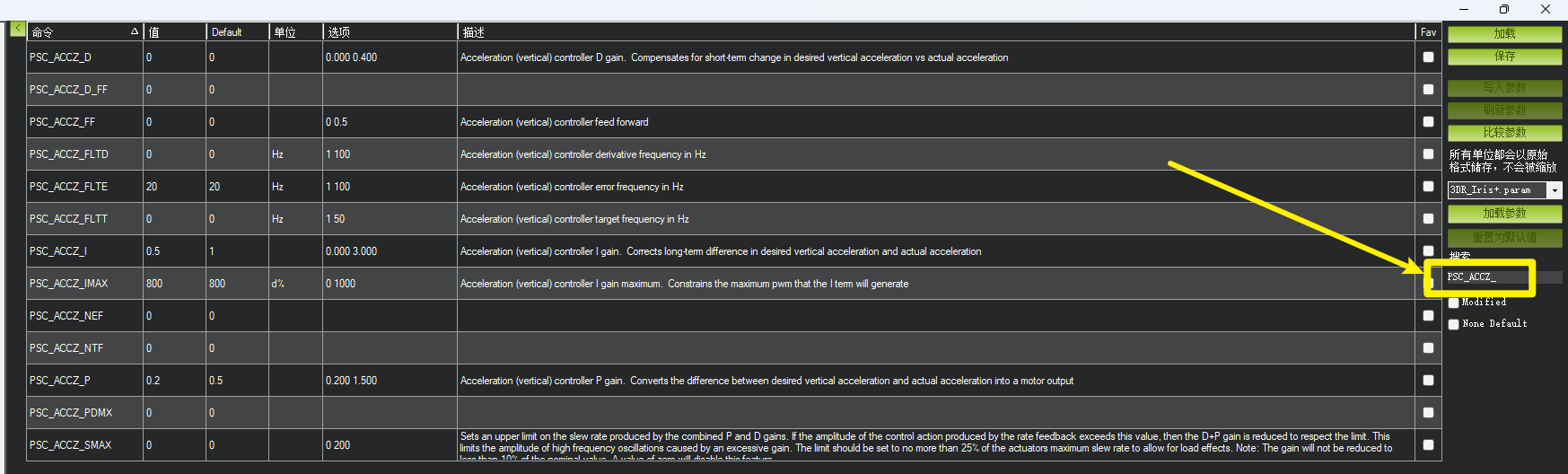
油门加速度P: PSC_ACCZ_P,默认值=1.0
油门加速度I: PSC_ACCZ_I,默认值=0.5
油门加速度D: PSC_ACCZ_D
如果修改P和I的值, 应该保持 P : I = 1 : 2(即I值是P值的两倍)。
这些值不应该增加,但是对于动力非常强劲穿越机,PSC_ACCZ_P和PSC_ACCZ_I都减小50%,可能会获得更好的响应(即P值为0.5,I值为1)。
油门加速度 I最大:PSC_ACCZ_IMAX =800 (默认), 此为积分限幅。负责消除稳态误差(如悬停时持续掉高),但是该值应该宁小 不过大!
增大该值:积分项出力更大,抗风能力更强,快速消除静态高度偏差(载重 / 逆风不掉高);但是容易出现积分饱和过冲,定高振荡加,高度忽上忽下!
减小该值:抑制超调与振荡,定高更平稳避免积分饱和,动态响应更线性;积分出力不足: 载重 / 逆风时持续掉高 定高慢、飘、弱,稳态误差大 大扰动下回稳慢!
垂直高度的加速度控制参数,请搜索参数:PSC_ACCZ_*
如何分析PSC_ACCZ_*参数调整后的日志?(油门加速度)
使用的定高模式进行急速加减油门测试(可以轰满油门然后急速拉下,循环10个架次,大概有个20s的飞行日志数据即可,不需要飞很高),然后分析日志。
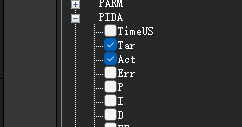
查看日志参数的PIDA.Tar(垂直方向的目标加速度)、PIDA.Act(垂直方向的实际加速度)两条曲线的拟合跟随情况。
先只动P项和D项的参数,找到PD平衡点,此时日志曲线会大致拟合。
然后再将当前的P项、I项、D项的参数都增大10%,再飞行测试,直到出现震荡;然后将P项、I项、D项的参数都降低10%~20%!
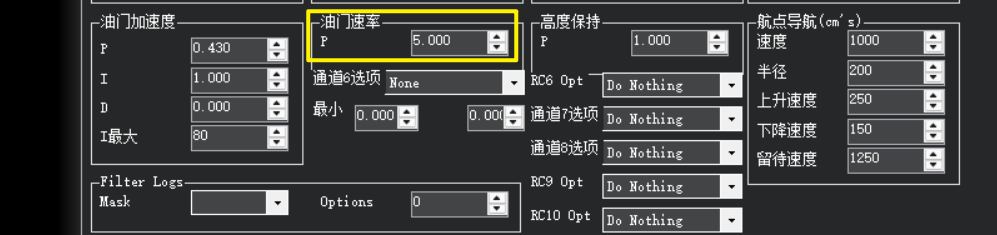
4.2 定高PID参数2:油门速率P参数PSC_VELZ_P
此参数用于将目标垂直速度与实际垂直速度的差值,换算成目标加速度,再传给油门加速度控制器。
此PID项一般不需要调前馈和I项目。
更多参数请搜索:PSC_VELZ_*
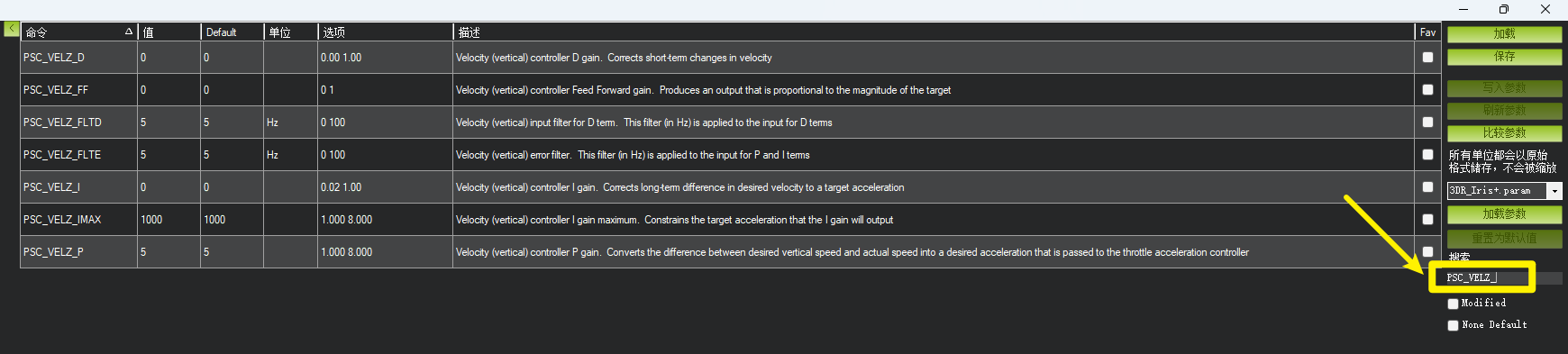
如何分析PSC_VELZ_*参数调整后的日志?(油门速率)
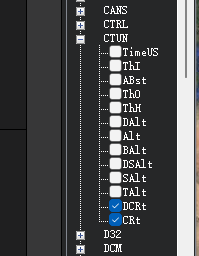
查看日志参数的CTUN.DCRt(期望爬升速度)、CTUN.CRt(实际爬升速率)两条曲线的拟合跟随情况。
4.3 定高PID参数3:高度保持P参数 PSC_POSZ_P(高度控制器的最外环,只有P控制)
PSC_POSZ_P ,默认=1.0

PSC_POSZ_P 高度保持P参数的含义:
它是垂直位置控制器的比例增益(P增益),用于调节飞行器高度控制的响应速度和稳定性。
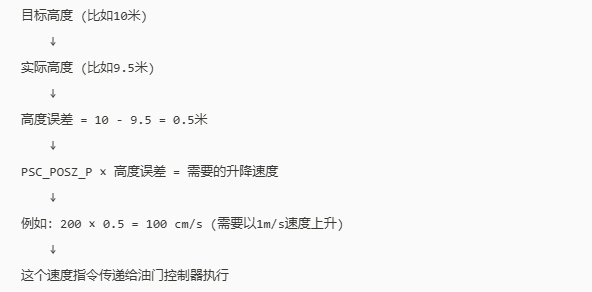
高度保持 P 功能用于将高度误差(期望高度与实际高度之差)转换为期望的爬升率或下降率。较高的速率会使飞机更积极地尝试保持高度,但如果设置过高,则会导致油门响应不灵敏。
这个参数决定了飞机对高度误差响应的"敏感程度",它把高度差转换成需要的升降的速度。调高增益可增强对高度偏差的响应,但过高会导致振荡。
举个例子如下:
如何分析PSC_POSZ_P参数调整后的日志?(高度保持)
查看日志参数的CTUN.DAlt(期望高度)、CTUN.Alt(实际高度)两条曲线的拟合跟随情况。
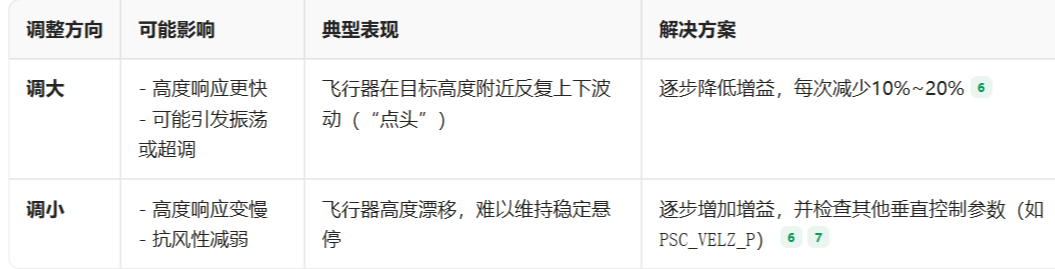
PSC_POSZ_P 高度保持P参数,调大或调小的影响:
PSC_POSZ_P 高度保持P参数,悬停静态测试:
- 在AltHold模式下悬停,观察高度是否稳定。
- 若高度持续上下波动(如“点头”现象),需降低
PSC_POSZ_P。 - 若高度响应迟钝(如缓慢漂移),可适当增加此值
PSC_POSZ_P 高度保持P参数,动态打杆测试:
- 手动快速推拉油门,观察高度变化的跟随性。
- 若出现超调或震荡,需减小增益;若响应迟缓,则增大增益。
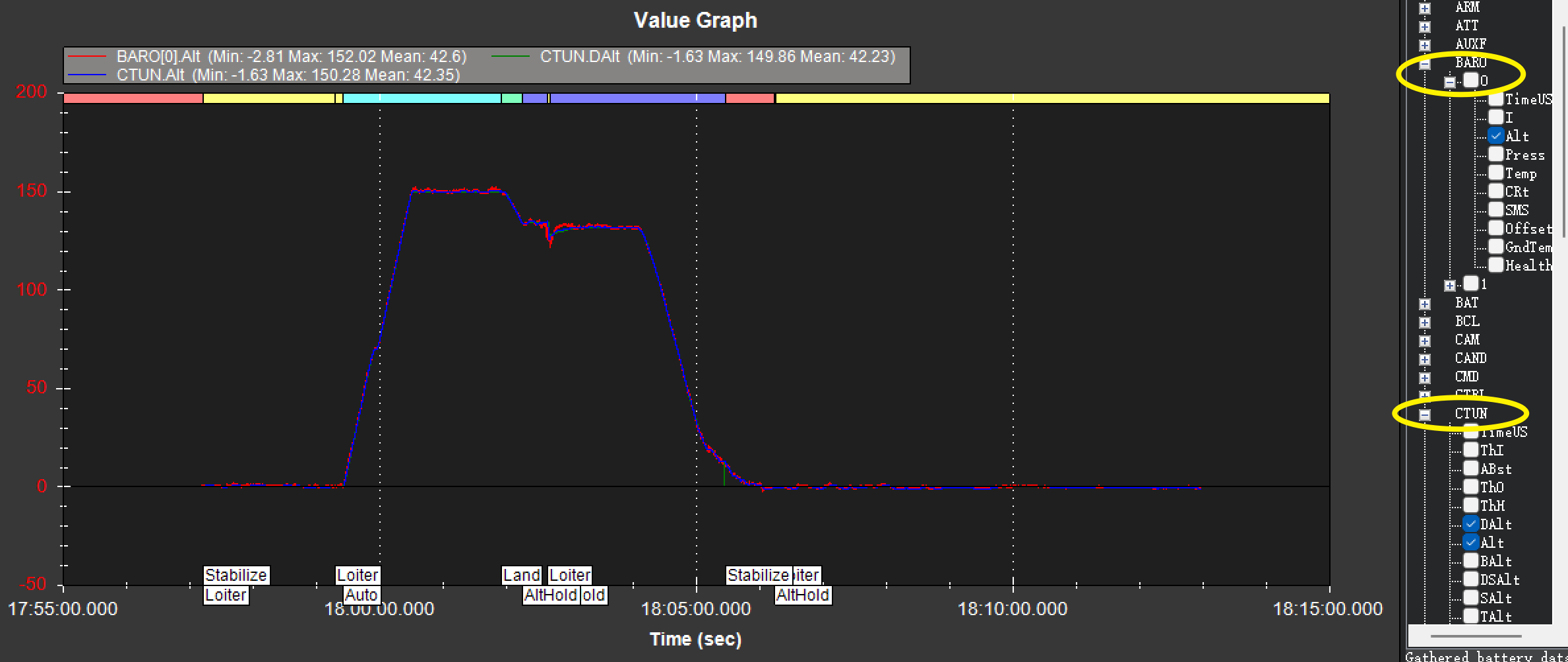
5、如何通过飞控闪存日志分析定高效果?
下载日志,比较气压计的原始高度(BARO.Alt)、高度控制器的目标值(CTUN.DAlt)、状态估计器融合后高度(CTUN.Alt),如果三个参数的曲线基本保持一致,那么其定高效果比较良好。
6、垂直加速度控制器其他参数详解
PSC_ACCZ_FF垂直加速度控制器前馈项
取值范围:0-0.5,单次增量:0.001
作用:它是基于目标加速度的比例前馈,让飞控在你打杆、目标加速度变化时,直接输出对应的油门预补偿,不用等误差出现再由 P/I 项去修正;简单说:打杆时的 “油门预判”,让飞机跟手、不滞后。
调大:升降跟手度大幅提升,急推油门飞机立刻响应,几乎没有滞后;定高抗风时,飞控能提前预判目标变化,修正更及时。
调大的风险:油门会变 “冲”,推一点杆飞机就猛窜,手感生硬。容易引发高频油门抖动、超调弹跳,甚至出现定高振荡。对 FLTT(目标滤波)非常敏感,滤波稍低就会抖。
调小:油门更柔和,升降顺滑,没有突兀的冲劲,电机也更安静。
调小的风险:打杆滞后明显,飞机反应慢半拍,跟手度差;抗风、抗扰动时,飞控只能靠 P/I 项修正,响应慢,容易掉高、飘高。
PSC_ACCZ_FLTT,垂直加速度控制器的目标信号低通滤波频率,单位是 Hz。
取值范围:1-50,单次增量:1
作用:滤掉目标信号里的高频变化,让打杆/指令更平滑,防止油门乱抖。【目标信号是输入信号,可以理解为打杆输入】
调大:放更多的控制信号进来,响应会灵敏,但是可能会震动。一般先调个20试试。 然后尽可能提高,直到抖动再降低!
调小:截更多的控制信号,会让高度平滑,但是容易滞后,响应较缓慢。
其他:与下述PSC_ACCZ_FLTE配合调试;先调此参数,再调下述参数!
PSC_ACCZ_FLTE,垂直加速度控制器的误差信号(目标-实际) 低通滤波频率,单位 Hz。
取值范围:1-100,单次增量:1
作用:把传感器噪声、误差里的高频成分滤掉,再传给 PID 计算,让修正动作(PID输出)更平滑,防止油门乱抖。
调大:滤波变弱,误差信号里的高频成分能更多地通过;控制器对误差变化反应更快,修正动作更直接,定高和抗风的响应会更佳。
调大的风险:误差里的传感器噪声会直接喂给 P/I/D 项,尤其是 D 项会被放大,导致电机高频抖动啸叫、油门小幅高频跳动、机架共振被放大,甚至出现高频振荡
调小:滤波变强,误差信号被 “磨平”,只保留低频变化;控制更平滑,电机更安静,高频抖动被抑制。
调小的风险:定高修正变 “肉”,高度误差消除变慢;容易出现低频上下振荡;;抗风、抗扰动能力下降,遇到气流时高度飘得更厉害。
其他:与上述PSC_ACCZ_FLTT配合调试;先调上述参数,再调此参数!
PSC_ACCZ_FLTD,垂直加速度控制器微分项(D-term)专用的低通滤波频率,单位是 Hz。
取值范围:1-100,单次增量:1
作用:作用对象是高度控制器误差信号的微分项,也就是 PID 中的 D 项;可以理解为给 D 项输出之前,加了一道 “筛子”,滤掉高频噪声,再送到油门控制。
增加这个参数的原因是:PID的D 项是天然的高频放大器!D项是对PID的误差变化率进行累加,传感器的原始信号是有微小毛刺,很容易被噪声带偏,所以需要单独 “降噪”。
调大:滤波变弱,D 项能 “看到” 更多高频信号。飞机的阻尼感更强,刹车、防超调的效果更明显,升降时的惯性晃动被压得更死。适合陀螺仪噪声很低、机架刚性很好,D 项增益较高时使用。
调大的风险:但极易放大传感器噪声,出现:电机高频抖动啸叫、油门小幅高频跳动、机架共振被放大,甚至引发高频振荡。
调小:滤波变强,D 项的高频成分被大幅滤掉。噪声被有效抑制,电机安静,机架不抖,稳定性提升。适合场景:陀螺仪噪声较高、D 项增益偏大,或者出现明显高频抖动时使用。
调小的风险:但会引入相位滞后,导致 D 项的阻尼 / 刹车效果变弱:升降时容易超调、弹跳;定高时会出现慢摆,晃动收敛变慢。
PSC_ACCZ_D_FF垂直加速度微分前馈增益进阶参数,新手不建议开启!
取值范围:0-0.02,单次增量:0.0001
作用:它是基于目标加速度变化率的微分前馈,它的输出和目标加速度的变化速率成正比,相当于给打杆的 “速度变化” 加了预判补偿。核心作用:在你打杆的加减速阶段,提供额外的油门补偿,让飞机的响应更跟手、更线性。
调大:打杆瞬间响应更快,跟手度拉满;
调大的风险:极易放大噪声,出现高频抖、油门啸叫,对机架和电机负载很大。
调小:更稳,噪声更小。
调小的风险:打杆有滞后感,跟手度差。
PSC_ACCZ_SMAX垂直加速度变化率限制进阶参数,新手不建议开启!通常不需要调试!
取值范围:0-200,单次增量0.5
作用:限制 P+D 项输出的变化速度,防止油门瞬间变化过快,抑制高频振荡。
PSC_ACCZ_PDMX垂直加速度 PD 项输出限幅进阶参数,新手不建议开启!通常不需要调试!
取值范围:0-1000
作用:限制 P+D 项能输出的最大油门变化量,防止 PD 项出力过大导致振荡。