6、跟油门控制、杆量相关的参数
待更新
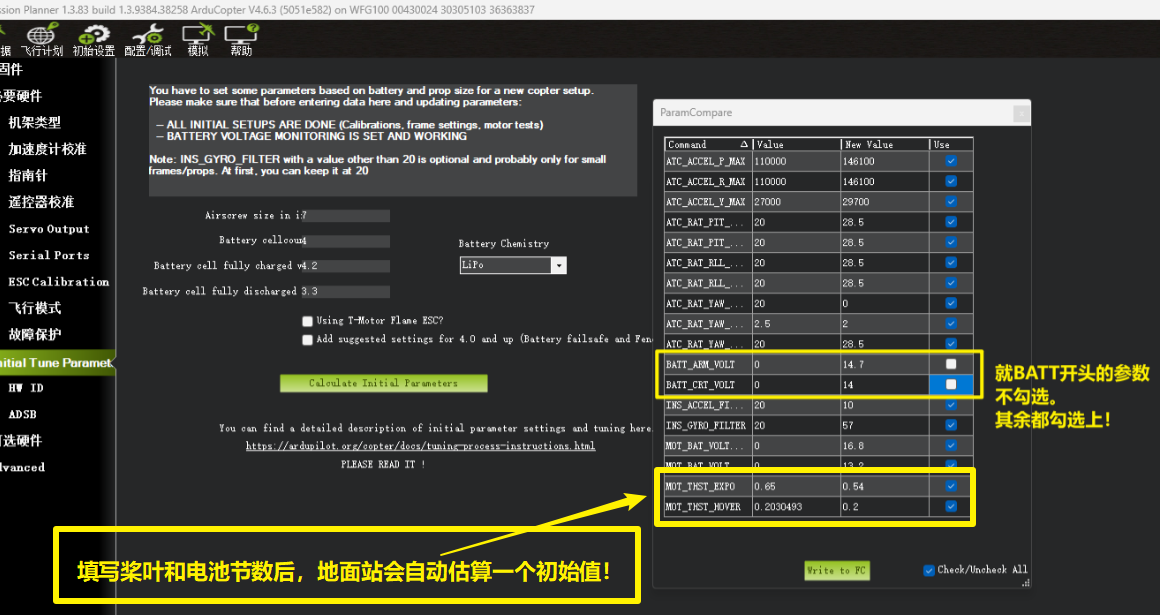
参数1:MOT_THST_EXPO
该参数是油门百分与实际推力的补偿曲线,默认值 = 0.65。
- 对于动力很猛的穿越机,悬停油门很低的无人机,该参数往小设;这样在低油门(悬停附近)推力更小、手感偏肉。
- 对于大部分无人机,设置0.6-0.7均可!
- 对于载重机、动力偏弱、悬停油门偏高的无人机,可设置在0.7-0.85。低油门时推力提升更明显,悬停附近反应更灵敏;但高油门更容易 “冲”
参数2:MOT_THST_HOVER
该参数默认=0.35,代表的前50%的油门行程只有35%的油门输出,后50%的油门形成有65%的油门输出。
如果是穿越机比较猛的动力,这个值可能要设置到0.15~0.2左右。
根据本人的本人的实测是5寸/7寸穿越机首飞时候设置为0.2,F450首飞时设置为0.25。
此外MOT_THST_HOVER和MOT_THST_EXPO 可通过初始化配置进行设定,具体如何设置,请参阅文档《根据桨叶与电池电压生成出初始PID参数》
首次设定后,通常不需要我们再进行调整,因为AP固件默认会开启油门比例自动学习,参数MOT_HOVER_LEARN=2,建议大家一直保持油门自动学习即可!
参数3:THR_DZ
该参数调节定高或定点模式下的油门死区,作用在定高和定点模式,默认值是100,可调范围是0-300;
100代表是的是10%的油门死区,就是说50%油门各自增减10%,也就是40%~60%是定高/定点模式的油门死区。
在这个油门死区内,轻微推拉油门杆飞控会自动忽略操作。具体要设置多少,根据飞机以及大家的手感去配置!
参数4:ATC_THR_MIX_MAN
该参数的含义是:当飞机处于极限状态下, 是姿态响应优先还是油门响应优先。默认是0.1(油门响应的优先级最高)
值调高(比如0.9)→ 优先姿态控制
- 表现:当你猛打杆转弯时,飞控会确保飞机能完成转弯动作,即使这意味着高度会突然下降
- 感觉:飞机转弯很灵活,像跑车一样听话,但转弯时可能会突然掉高度
- 适用:竞速穿越机、花飞表演、需要快速机动的情况。
值调低(比如0.1)→ 优先油门控制
- 表现:当你猛打杆转弯时,飞控会优先保证高度不掉,转弯动作会变慢或不完全
- 感觉:飞机像大卡车一样稳重,转弯时高度保持很好,但转弯反应迟钝,甚至转不过去
- 适用:航拍机、物流无人机、载重飞行、新手操作。
默认值(0.5)→ 平衡两者
- 50%精力保高度,50%精力保姿态
- 适合大多数普通飞行场景。
参数5:ATC_INPUT_TC
该参数,姿态控制输入时间常数。数值越小,响应越灵敏;数值越大,响应越柔和。在所有需要姿态控制的飞行模式下都会生效。
当你打遥控器摇杆时,飞控是"立刻猛冲"还是"温柔渐进"地响应你的指令,默认 = 0.15。
低值代表立即响应,高值代表代表缓慢平顺响应!
- 穿越竞速/花飞:0.1-0.15(要快!要猛!)
- 普通自稳飞行:0.2-0.25(平衡)
- 航拍/测绘:0.3-0.4(要稳!要平顺!)
- 载重/物流:0.4-0.5(安全第一)
参数6:PILOT_Y_RATE
该参数决定了 偏航速率的大小。
值越高,旋转速度越快。默认为202.5°/s,意思是在当摇杆打到最大时,转速为202.5°。
- 小穿越机:250-300°/秒(越小越灵活)
- 普通450mm:150-200°/秒(平衡选择)
- 大六旋翼:100-150°/秒(稳字当头)
- 航拍机:80-120°/秒(画面第一)