2、首飞多轴时-常见的PID参数参考
前言: 以下参数,只能说可以让飞机首次飞行时,实现较为平稳的起飞(不至于直接翻机震动等),但是 感度、杆量、响应速度肯定是比较差的,还需要人为进行精调整! 一、F450无人机-首飞PID参数 F450这款无人机,一般是采用9寸桨,KV值98...
前言:
接触过无人机的朋友,应该都是知道PID调参。不同轴距的机架、不同型号的电机其PID参数是不一样的。如果PID参数严重不符,那么无人机将无法在空中保持姿态稳定,可能会出现空中剧烈抖动或晃动。
因此针对新手常用的F450无人机、5寸穿越机、7寸穿越机,提供一些PID参数供大家作为参考!
以下参数,只能说可以让飞机首次飞行时,实现较为平稳的起飞(不至于直接翻机震动等)。但是其感度、杆量、响应速度肯定是比较差的,不那么跟手,还需要人为进行精细的调整!
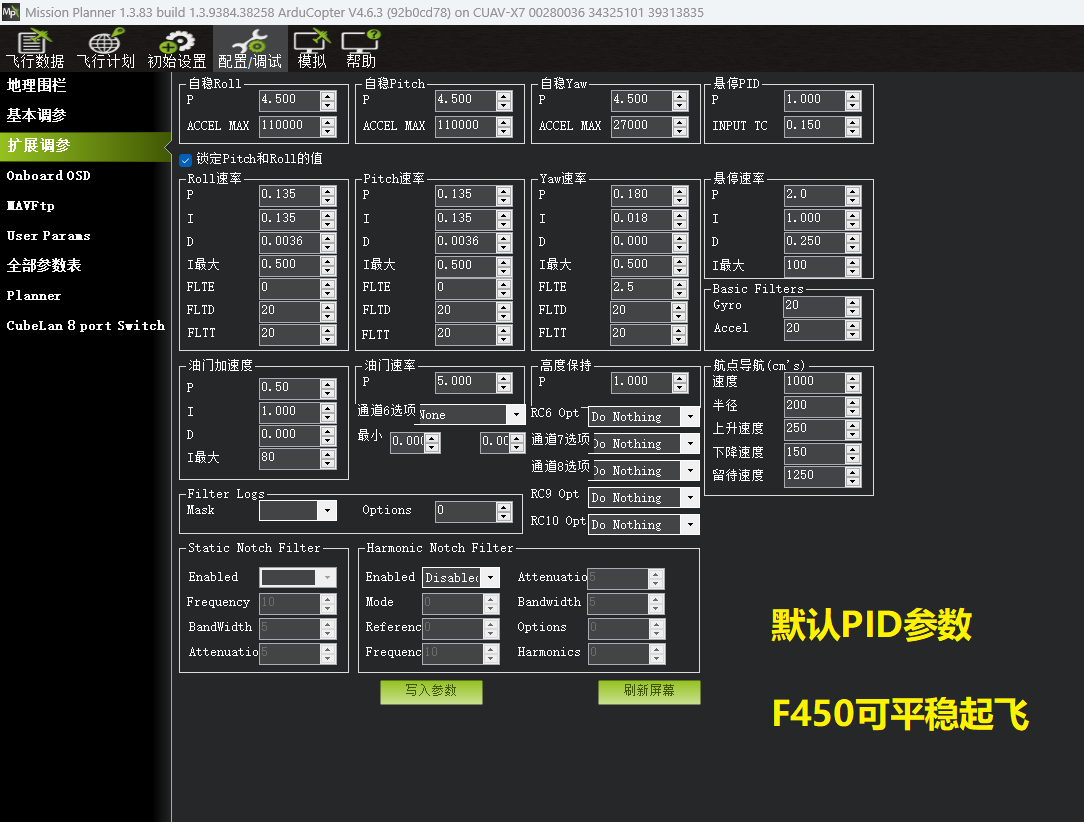
一、F450无人机-首飞PID参数
F450这款无人机,一般是采用9寸桨,KV值980-1200左右,电池通常是3-4S。
这款机型,基本上装机后默认参数即可平稳起。
电池:4200mah电池
电机:2212无刷电机, kv950
桨叶:9寸自紧桨。
二、5寸或7寸穿越机-首飞PID参数
穿越机的动力非常足,因此5寸穿越机或7寸穿越机上使用AP固件时。
请务必将俯仰轴与横滚轴的P项的值下调至0.04(默认是0.135),避免起飞就超调失控!

三、7寸穿越机-首飞PID参数
自稳模式可以非常稳定的起飞。
动力电池:4200mah、4S、整机重量915g
动力电机:2807电机-1300KV。
桨叶:7寸三叶桨。

