3、使用lua脚本快速调参(QuickTune)
前言: 当无人机能够基本起飞并且定点时,可用AP官方自带的lua脚本,进行快速调参! 本人已打包好压缩包,下载解压后,.lua格式的文件便是脚本文件! APM快速调参-lua脚本.zip 也可以直接到AP固件的github链接直接下载: h...
前言:
当无人机能够基本起飞并且定点时,可用AP官方自带的lua脚本,进行快速调参!
本人已打包好压缩包,下载解压后,.lua格式的文件便是脚本文件!
也可以直接到AP固件的github链接直接下载:
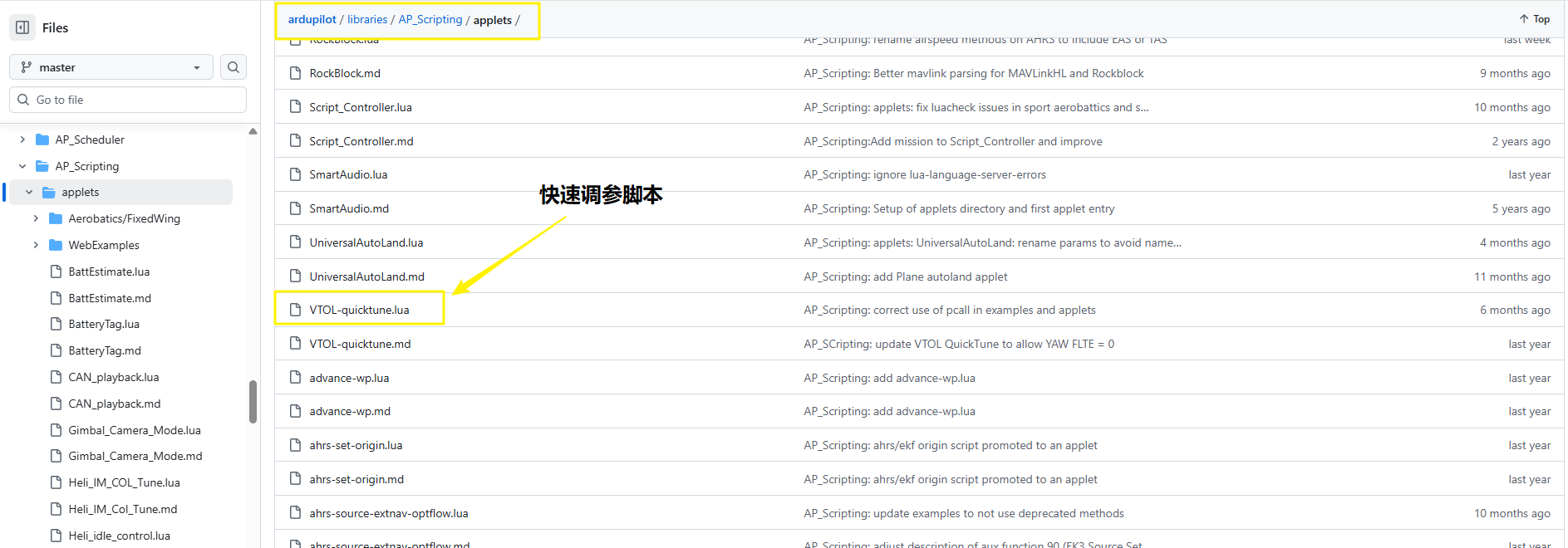
https://github.com/ArduPilot/ardupilot/tree/master/libraries/AP_Scripting/applets
快速调参脚本的名称写着是:VTOL-quicktune.lua,实际上这个脚本即可以对垂起的四轴模式进行PID调参,也可以对多旋翼的PID参数进行快速调参!
AP固件快速调参和自动调参区别
相信玩AP固件的朋友都知道,调试PID参数时,可以使用AutoTune自动调参模式,它会在定高模式下一抽一抽的进行调参,最终调好所有参数后,降落加锁就能保存参数!
- 自动调参能够调参的参数比较多,效果也比较好, 但是使用自动调参时,无人机需要要一抽一抽的摆动(且要在定高模式下),具备一定的危险性!
- 而使用快速调参模式,会在定点模式下进行小幅度得震荡,飞机基本就是悬停在空中不会变化的,相对而言安全性较高。但缺点就是它只调角速率环的相关参数,无法找到最大旋转加速度(例如ATC_ACC_R_MAX、ATC_ACC_P_MAX、ATC_ACC_Y_MAX)
使用lua脚本快速调参的前提
前提1:无人机必须能够基本起飞保持姿态平台,只是打杆后的 手感很烂!AP固件默认的PID参数是可以比较平稳的起飞F450无人机。
但是起飞5寸机或7寸穿越机有超调,需要降低P,详见《常见多轴首飞时的PID参数》
前提2:无人机上装有GPS模块与罗盘,能够在loiter模式下,实现基础悬停。
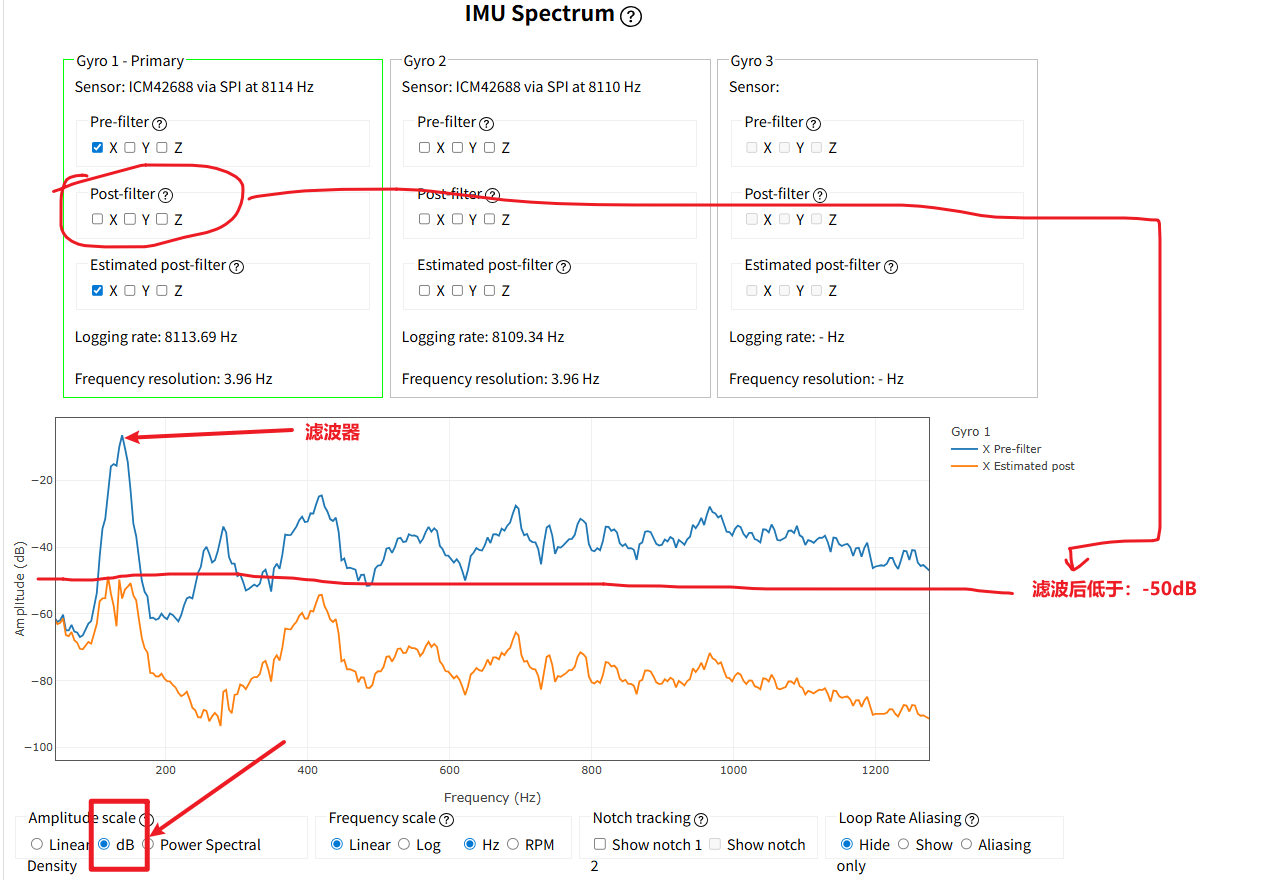
建议:使用lua脚本调参前,先完成滤波器调试
根据Ardupilot的官方wiki介绍,为了保证快速调参的效果最佳,请先设置噪声陷波滤波器。详见文档《低通滤波器与动态陷波滤波器的调试》
如果要开启动态陷波滤波器,建议飞控使用的STM32H743的主控,其主频高运算速率快,如果是F4的飞控可能会卡机!
此外,飞控的电调必须是支持双向Dshot的AM32电调或是BL32电调!同时飞控需要刷写的是支持双向Dshot的固件,并且飞控需要配置相关的Dshot参数!
注:但是对于新手使用的F450机体或5寸/7寸穿越机,其实不设置动态陷波滤波器,也是可以起飞的!(因为滤波器调试需要注意的事项还不少,新手先起飞后再来)
lua脚本快速调参的基本流程
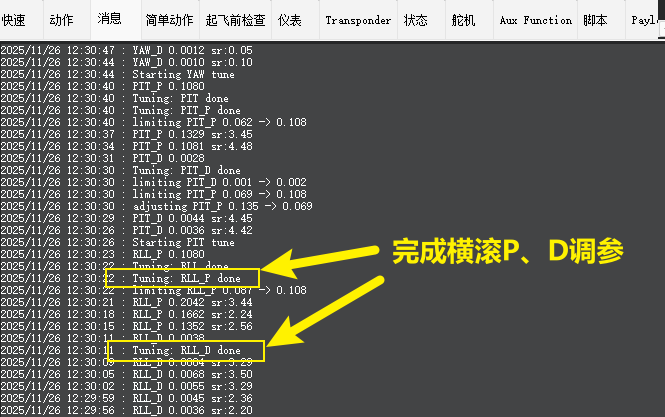
注意:快速调参只能调整姿态内环,也就是角速率环的横滚轴、俯仰轴、航向轴的P项和D项,PID的I项会直接和P项保持一致,如果需要对I项进行精调。

整个调参过程在3-5分钟内就可以完成!飞控会自动调整以下参数:
ATC_RAT_RLL_D
ATC_RAT_RLL_P、ATC_RAT_RLL_I
ATC_RAT_PIT_D
ATC_RAT_PIT_P、ATC_RAT_PIT_I
ATC_RAT_YAW_D
ATC_RAT_YAW_P、ATC_RAT_YAW_I

如何设置lua脚本快速调参?
一、TF卡准备
1)这个TF卡内存不需要很大(一个脚本文件连1MB都没有),最好选用一些质量较好的大牌厂商卡。
本人曾因贪图便宜,在某多多买了一批卡,调着卡就挂了~~~~~
2)将SD卡进行格式化 (电脑默认格式化方式即可)
二、使能脚本功能
首先将参数SCR_ENABLE 设为1

2)给飞控断电,将格式化后的TF卡插入到飞控的TF卡槽中。
3)重新给飞控上电,并连接MP地面站!
注:有些朋友的飞控可能用的是闪存芯片,无法插拔SD卡,可通过MAVFTP进行访问,请继续往下看!
三、通过MAVftp上传脚本文件到TF卡中
具体操作如以下视频:
上传脚本完成后,请务必记得重启飞控!
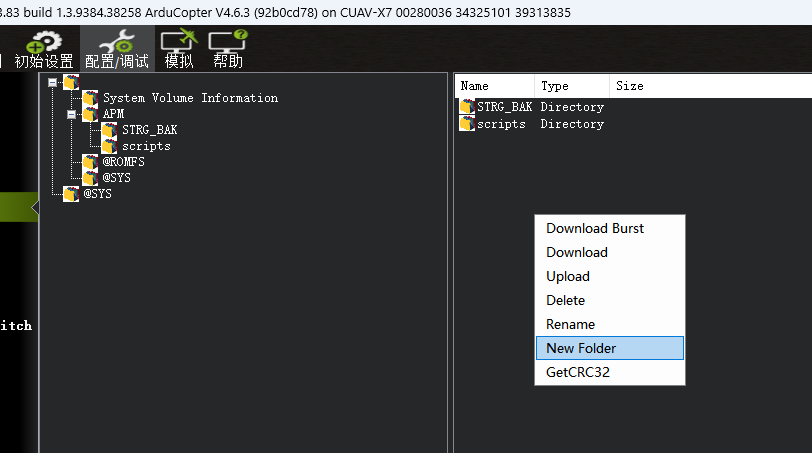
注:如果发现里面没有scripts文件夹,用户可将鼠标放在右侧空白区域,右键新建New Floder,并命名为scripts文件夹!
四、使能快速调参
重启飞控后,通过MP地面站,刷新参数;
搜索参数QUIK_ENABLE ,将其值 =1。 使能快速调参!

五、选择遥控器上的一个3挡开关
在遥控器上找一个3挡位波动开关的通道。
当3挡位开关处于中间挡位时,表示自动调参开始!
调参完成后,打到低PWM值的挡位,表示放弃保存调参后的参数。
调参完成后,打到高PWM值的挡位,保存调参后的参数据!
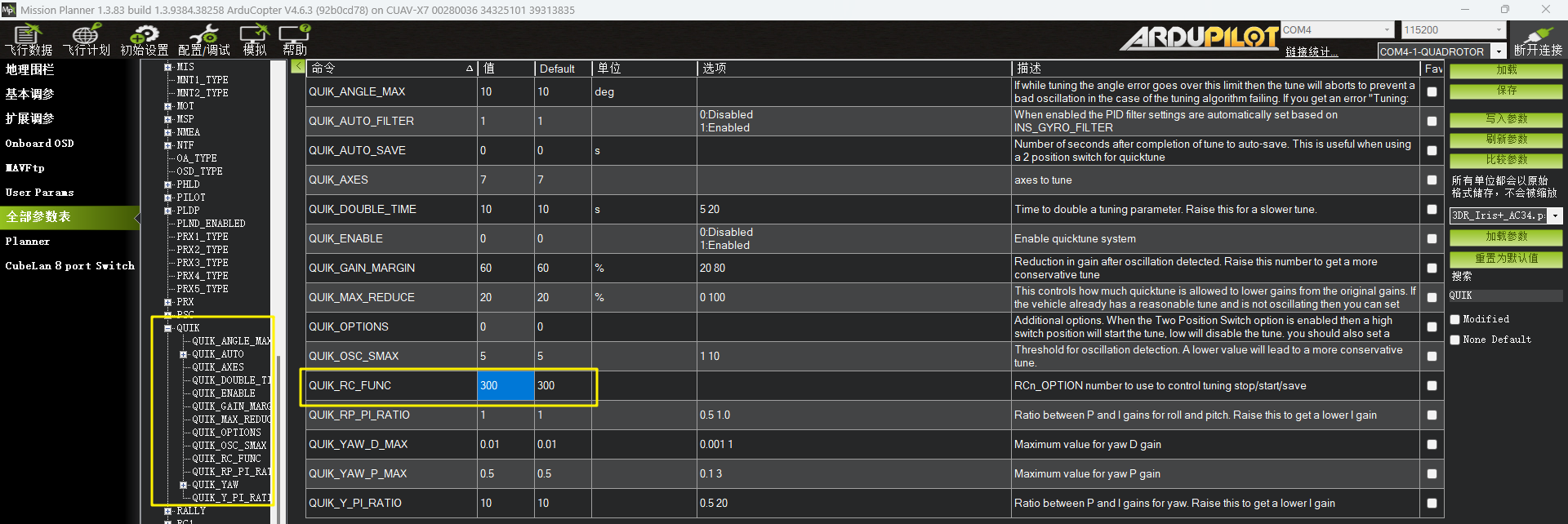
这里我们假设用遥控器的通道7。将通道7的功能设置为300(这个值是脚本默认写死的,必须设置为300)
由于前面我们假设,遥控器通道7这个3挡开关,作为调参保存与不保存的通道,因此我们需要将 RC7_OPTION = 300
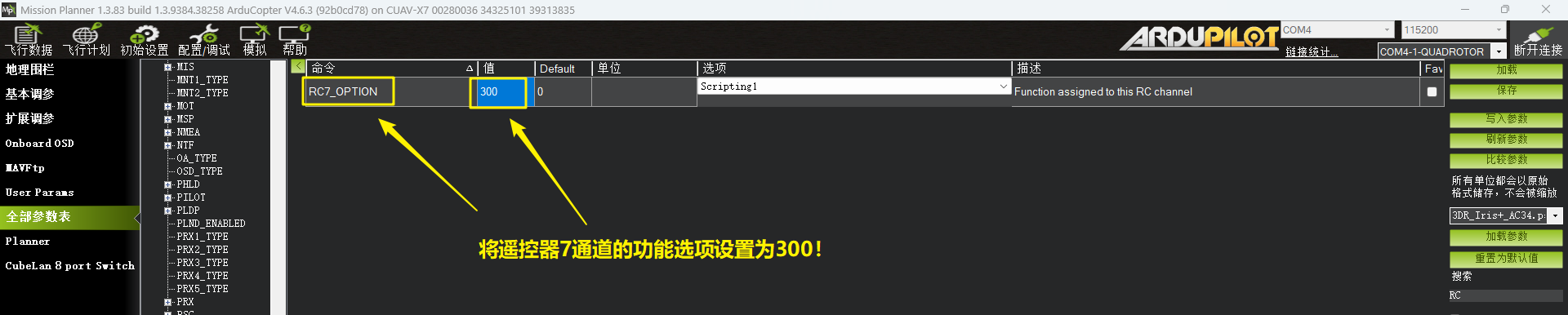
上述设置完成后,在“扩展调参”页面中,可以看到7通道的功能已被修改!

重启飞控,上电后,地面站会提示“Quicktune for multicopter loaded”,多旋翼快速调参已加载!
六、开始脚本自动调参
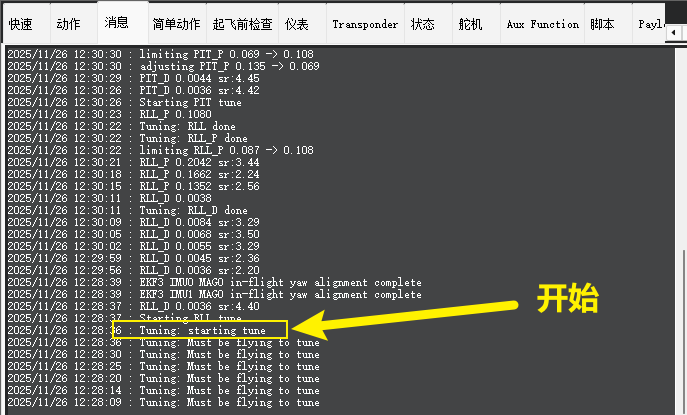
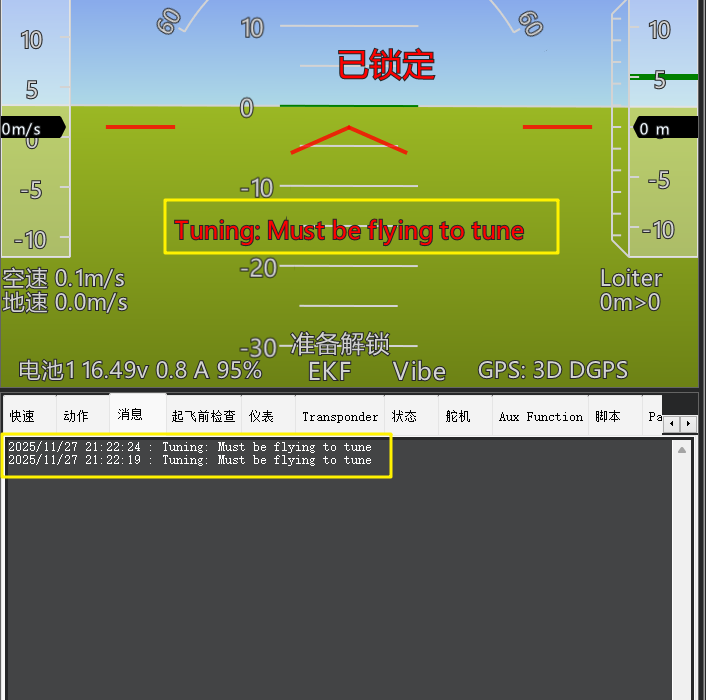
1)将遥控器设置的7通道打到中间挡位,无人机处于地面时未解锁时,地面站的消息栏会一直提示“Tuning: Must be flying to tune”,必须起飞后才能进行调参。
如下图所示:
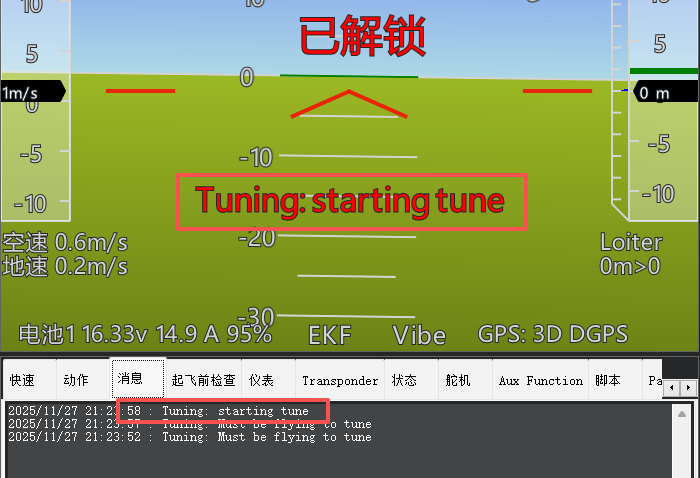
2)此时,我们将无人机解锁起飞到距离地面3-5m的高度,并切换到Loiter模式后(也可以直接以Loiter模式起飞)。
当我们的无人机处于悬停状态,且没有打杆的时候,飞控便会进入快速调参状态!
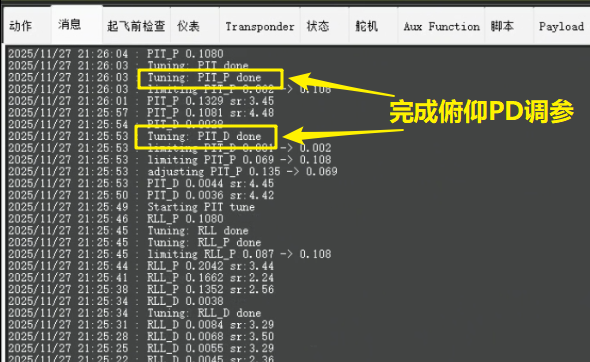
地面站会显示“Tuning:starting tune”调参开始
3)调参过程如视频所示,大概仅需几分钟即可自动调参完成,整个过程如下视频所示:
4)调参完成,将3挡开关打到高PWM值挡位,保存参数;
如果不需要这个快速调参侯的参数,那么将3挡开关打到低PWM值挡位,即可放弃保存参数!
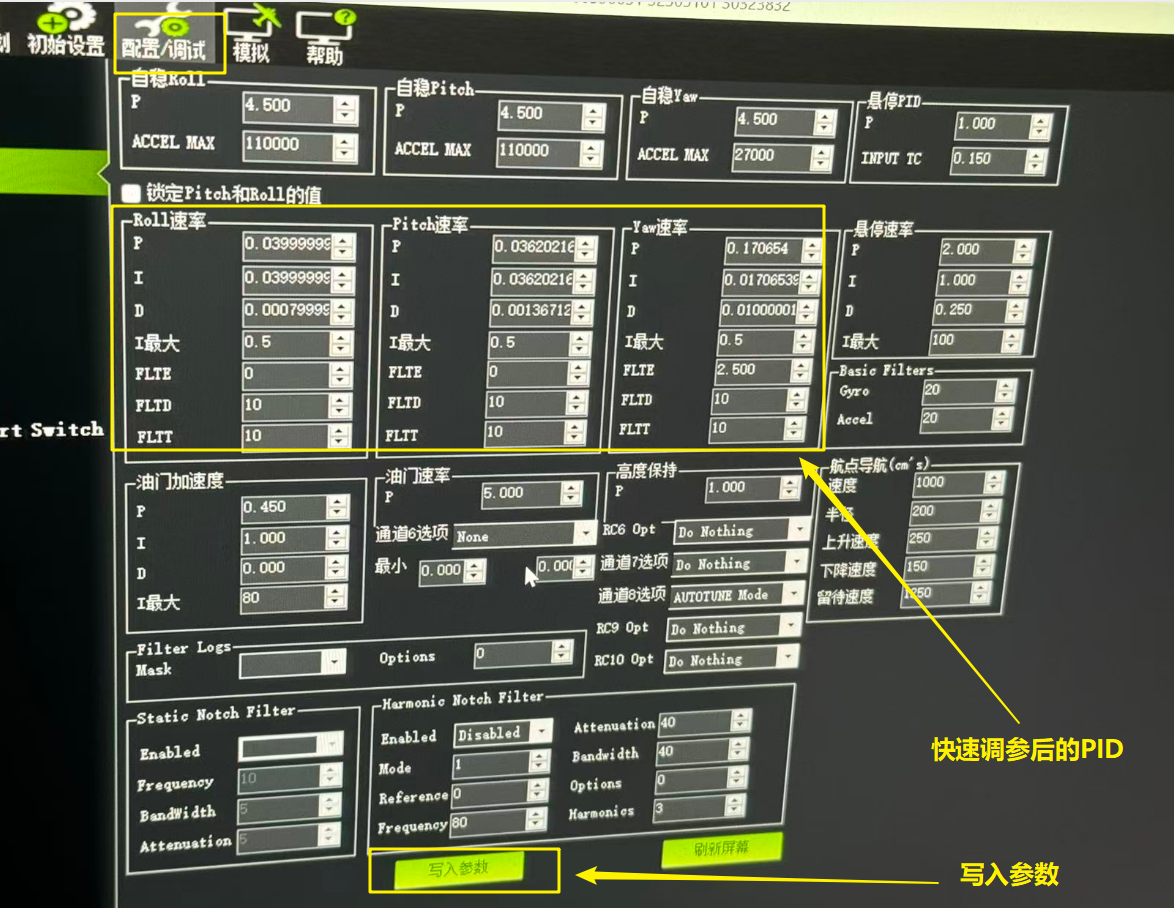
5)到扩展调参页面,再点击一次写入参数!
6)所有调参结束后,我们需要关闭快速调参功能、关闭脚本功能、关闭7通道功能。
QUIK_ENABLE = 0
SCR_ENABLE = 0
RC7_OPTION = 0