4、WFG100用户手册
WFG100飞控使用说明书 注意: 在开源V1版本中(在开源V2版本中,则直接移除了这个保护,USB通电后便会有5V输出) 为防止外设的大电流烧坏电脑USB口,USB供电与外设供电做了隔离! 飞控必须接入电池后,SH1.0端子连接器上的5V...
前言
在开源V1版本中:为防止外设的大电流烧坏电脑USB口,USB供电与外设供电做了隔离!飞控必须接入电池后,SH1.0端子连接器上的5V才会有输出;使用USB供电,接收机和GPS接入后没有上电(因为端子没有5V输出),属正常现象,大家切记!
如果不要这个保护,想要插入USB线,就有5V输出。只需要去掉一颗D3二极管,并短接二极管上的两个焊盘即可,如下图所示:
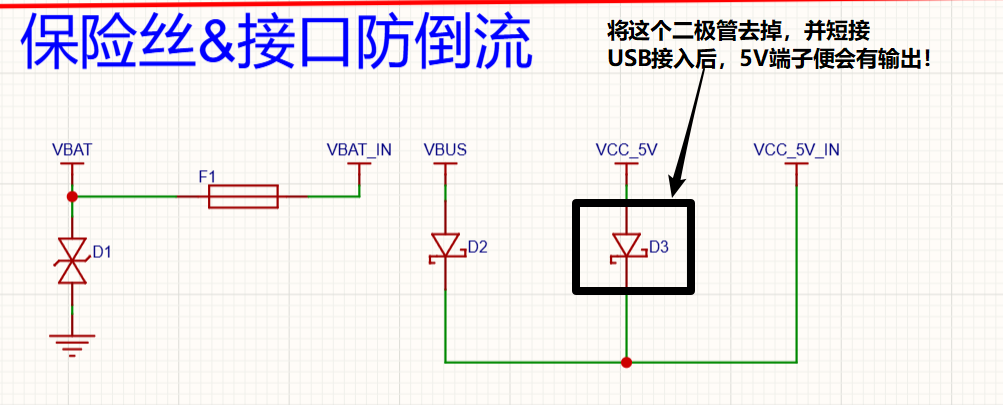
注:V1版以后的PCB硬件都移除了此保护,飞控USB供电后,飞控的SH1.0端子便会有5V对外输出!
WFG100A飞控各版本差异
截至2026年4月,WFG100A共计推出了V2、V3、V4三个版本。其具体差异可查阅《前言:WFG100A飞控各个硬件版本的区别?》
飞控概述
- 面向的无人机控制系统科研推出的一款开源飞控,软硬件设计资料全部开源。
- 板载集成双路IMU传感器、磁罗盘传感器、气压计、模拟OSD模块。
- IMU已适配ICM42688P、ICM42605、BMI270、国产型号等多种。
- 预留SPI接口,支持添加高精度SPI协议的气压计/IMU/磁罗盘等外设传感器。
- 兼容 ArduPilot / PX4 / Betaflight / INAV四种固件,提供引脚配置文件。
- 丰富的外设接口,为用户提供强大的扩展能力及二次开发潜力。
- 板载板载两路BEC输出:5V@3A、10V@3A ;支持3S-6S的电池输入供电。
- 30.5mm X 30.5mm安装孔位,具备SH1.0外设端子接口的同时,保留焊盘的连接方式。
参数规格
- 主控:STM32H743VIT6, 480MHz, 2MB Flash
- 加速度计与陀螺仪:双IMU槽位设计,已兼容双ICM-42688-P、ICM-42688+ICM42605、ICM-42688+BMI270及双国产IMU设计。
- 板载气压计: SPL06
- 板载磁罗盘: QMC5883P
- 板载OSD芯片: AT7456E
- 电调/舵机信号输出通道:共计10路(S1-S10,其中S1-S8支持双向Dshot通讯)
- 电调直插接口1:1个(集成电池正极输入BAT、电源GND、MOTO1~MOTO4、电流检测、串口RX)
- 电调直插接口2:1个(集成电池正极输入BAT、电源GND、MOTO5~MOTO8、电流检测、串口RX)
- 预留IO引脚:4个 (PIN_IO1 ~ PIN_IO4)
- 串口:7个
- CAN口:1个
- IIC口:1个
- 模拟摄像头接口:1个
- 模拟图传接口:1个
- 高清图传接口:1个(支持大疆O3/O4高清图传直插)
- STLINK调试口:背面引出焊点
- 蜂鸣器接口:背面引出焊点
- LED灯带接口:背面引出焊点
- 数据黑匣子记录方式:TF卡
硬件资料开源
WFG100A飞控定位是一款开源飞控,其原理图、硬件设计工程均开源,设计采用的是立创EDA专业版。
目前V2版、V3版、V4版的飞控硬件都采用的是V2版的PCB工程,详情请查看:《WFG100-立创工程汇总》
机头朝向、飞控姿态定义
机头朝向
在WFG100的AP/BF/PX4/INAV四种飞控固件中,默认是以焊盘点为顶面,机头朝向如下图所示:
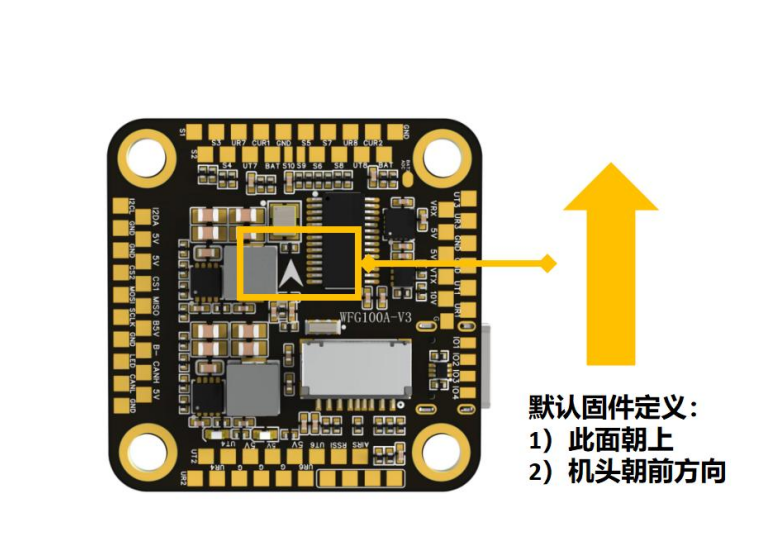
用户如需更换安装方式,需在飞控中通过参数进行翻转!
修改飞控的正反面安装方向,请查看文档《WFG100飞控的正反面安装方向调整》
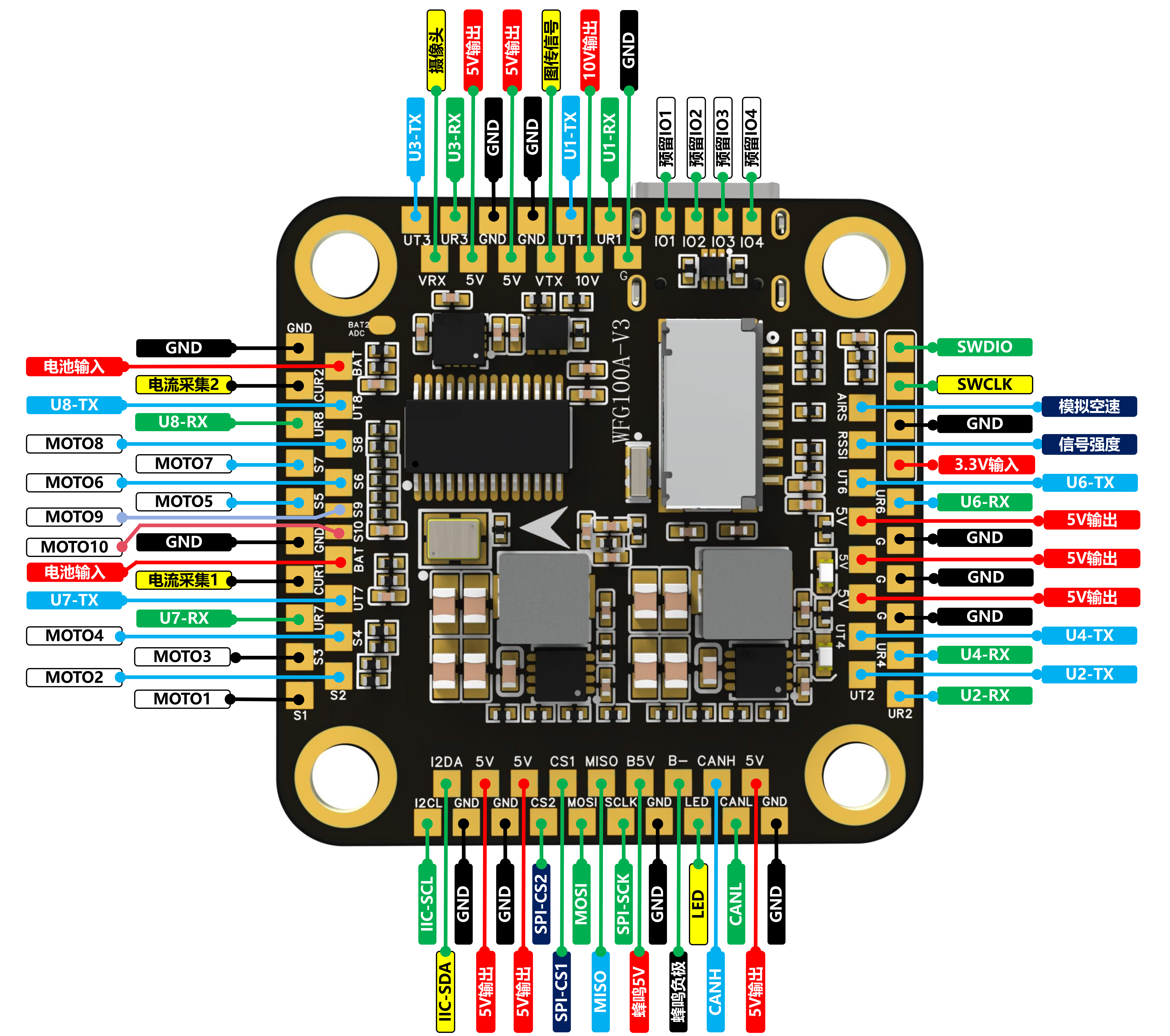
飞控接口、焊盘定义(可放大查看)
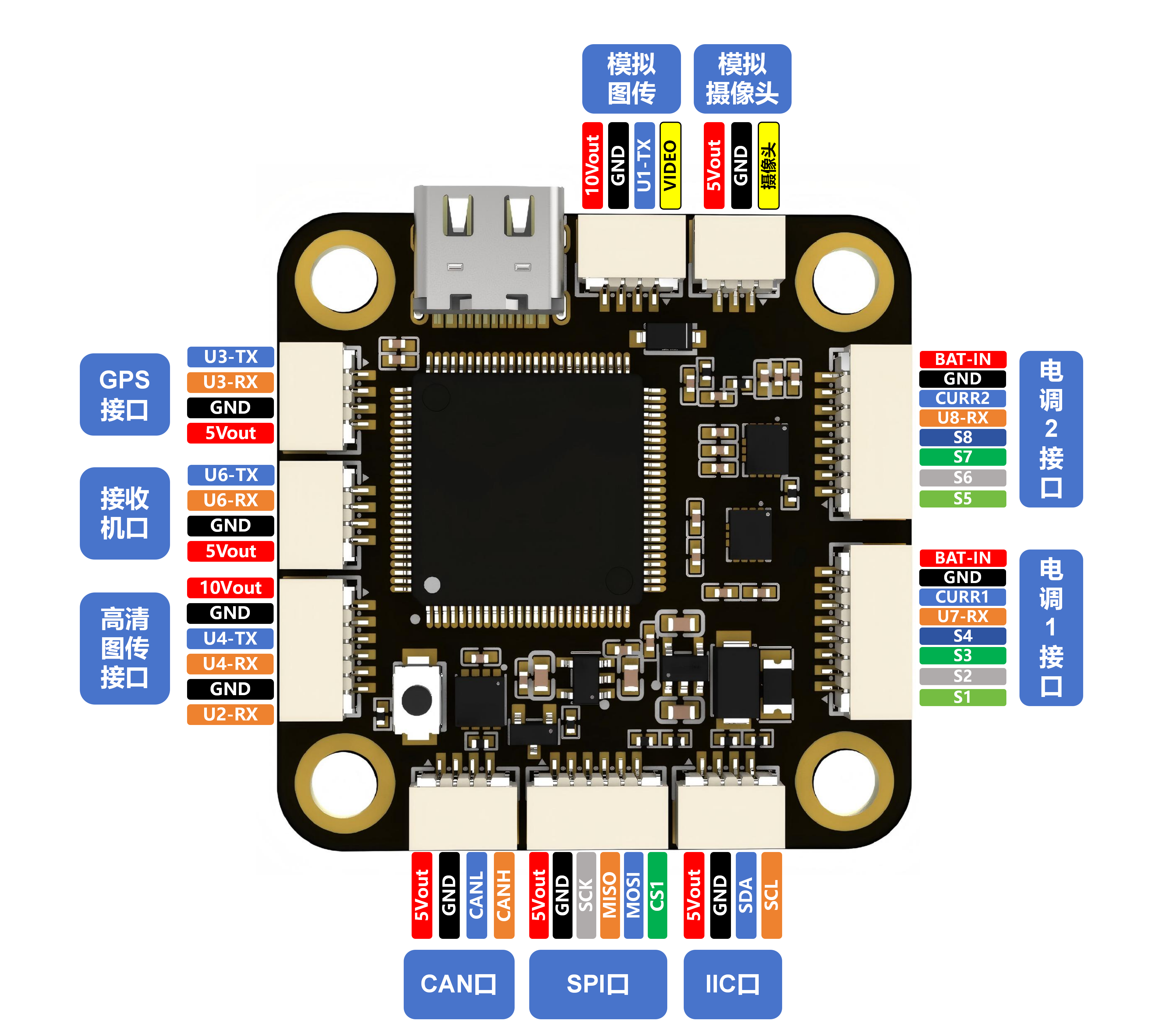
飞控与外设模块接线示意图
AP固件与PX4固件串口映射表
固件获取
WFG100飞控已完成对APM、BF、INAV、PX4固件的适配,请到以下固件清单进行下载:
《WFG100-V2/V3版固件下载(APM、BF、PX4、INAV)》
《WFG100-V4版固件下载(APM、BF、PX4、INAV)》
固件自行编译
如用户需要自行编译固件,请查阅《四大飞控源码编译教程合集》
此外,WFG100飞控在V4版启动了国产IMU型号,独立于官方仓库的版本,如需编译国产IMU版的源码,请参阅文档《物唯飞控-github仓库-固件编译说明》
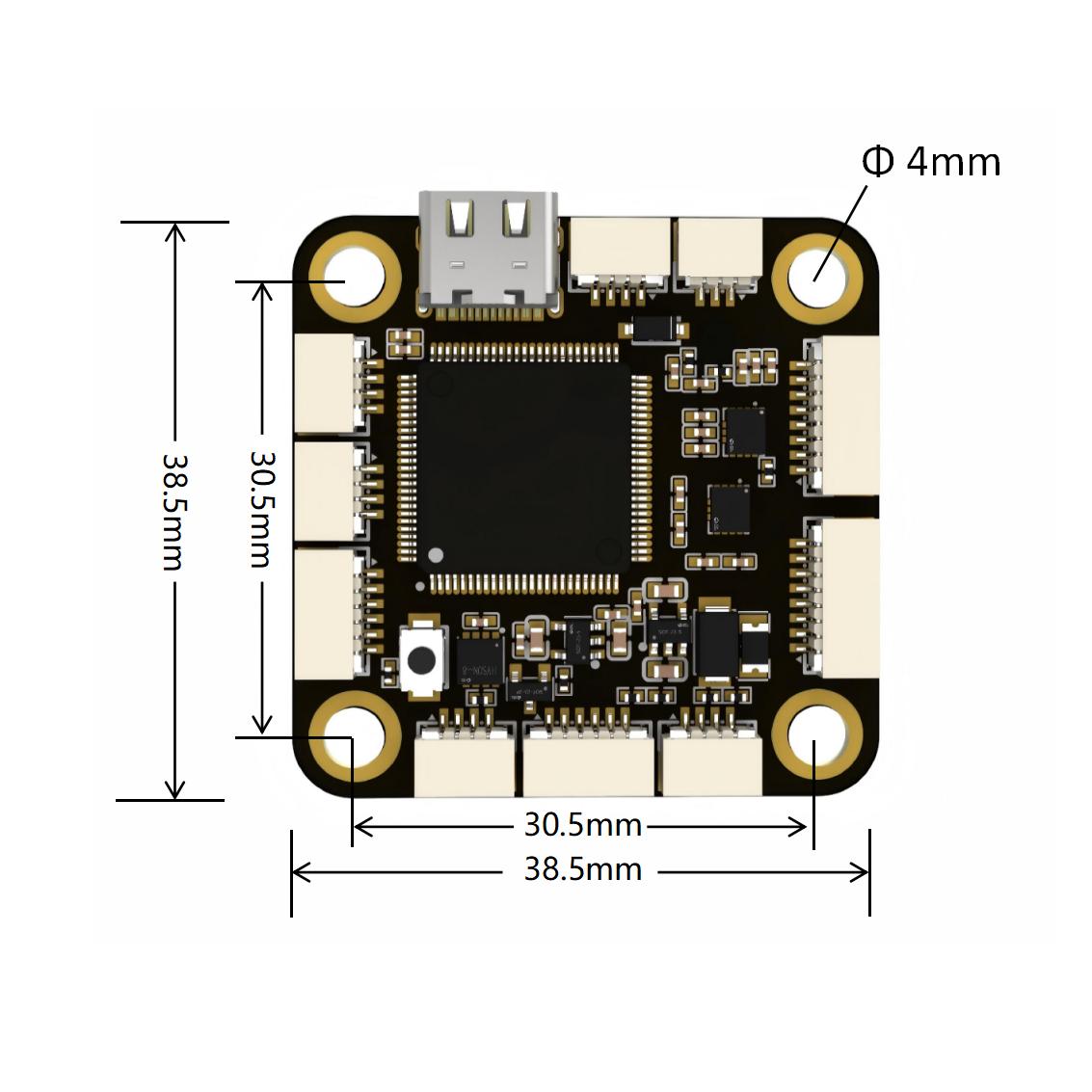
物理尺寸参数
定位孔间距:30.5 * 30.5mm
定位孔直径:4mm
PCB尺寸: 38.5mm(长) *38.5mm(宽) *7.5mm(高)
板卡重量:10g